- General Top
- SEMICONDUCTOR
- STORAGE
- COMPANY
-
My ToshibaSemicon
- Semiconductor Top
-
ApplicationsAutomotive
Body Electronics
xEV
In-Vehicle Infotainment
Advanced Driver-Assistance Systems (ADAS)
Chassis
IndustrialInfrastructure
BEMS/HEMS
Factory Automation
Commercial Equipment
Consumer/PersonalIoT Equipment
Healthcare
Wearable Device
Mobile
Computer Peripherals
-
ProductsAutomotive Devices
Discrete Semiconductor
Diodes
Transistors
Logic ICs
Analog Devices
- Automotive SmartMCD™ (Integreted SoC Conbining Microcontroller and Driver)
- Automotive Brushless Motor Driver ICs
- Automotive Brushed DC Motor Driver ICs
- Automotive Stepping Motor Driver ICs
- Automotive Driver ICs
- Automotive System Power Supplies ICs
- Automotive audio power amplifier ICs
- Automotive Network Communication
Digital Devices
Wireless Devices
※
 : Products list (parametric search)Power Semiconductors
: Products list (parametric search)Power SemiconductorsSiC Power Devices
※
: Products list (parametric search)Isolators/Solid State RelaysPhotocouplers
Digital Isolators
Solid State Relays
Fiber Optic Transmitting Modules
※
: Products list (parametric search)MOSFETsIGBTs/IEGTsBipolar Transistors※
: Products list (parametric search)Diodes※
: Products list (parametric search)MicrocontrollersMotor Driver ICsIntelligent Power ICs※
: Products list (parametric search)Power Management ICsLinear ICs※
: Products list (parametric search)General Purpose Logic ICsLinear Image SensorsOther Product ICsOther Product ICs
※
: Products list (parametric search) -
Design & Development
Design & Development
Innovation Centre
At the Toshiba Innovation Centre we constantly strive to inspire you with our technologies and solutions. Discover how to place us at the heart of your innovations.
-
Knowledge
Knowledge
Highlighted Topics
Further Materials
Other
- Where To Buy



- Part Number & Keyword Search
- Cross Reference Search
- Parametric Search
- Stock Check & Purchase
This webpage doesn't work with Internet Explorer. Please use the latest version of Google Chrome, Microsoft Edge, Mozilla Firefox or Safari.
require 3 characters or more. Search for multiple part numbers fromhere.
The information presented in this cross reference is based on TOSHIBA's selection criteria and should be treated as a suggestion only. Please carefully review the latest versions of all relevant information on the TOSHIBA products, including without limitation data sheets and validate all operating parameters of the TOSHIBA products to ensure that the suggested TOSHIBA products are truly compatible with your design and application.Please note that this cross reference is based on TOSHIBA's estimate of compatibility with other manufacturers' products, based on other manufacturers' published data, at the time the data was collected.TOSHIBA is not responsible for any incorrect or incomplete information. Information is subject to change at any time without notice.
require 3 characters or more.
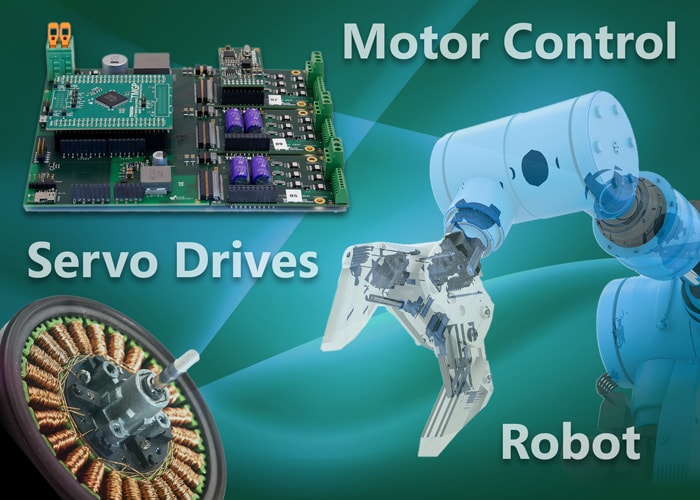
Making Servo Drives More Efficient in a Robotic/AGV Context
With all of us currently still living in what is a socially-distanced post-COVID world, the need for an automated approach to things remains very much apparent. A multitude of different tasks that would have previously relied solely on humans to carry out are now better done via some form of machine. In order to prevent the spread of the virus and keep infection rates down, greater emphasis has been placed on the use of robots on factory floors. In warehouses, autonomous guided vehicles (AGVs) have likewise become commonplace, taking responsibility for materials handling activities. Some countries, especially in Asia, have deployed AGVs to deliver medicine and food supplies to residences during lockdown periods.
It is through their servos that the movement of AGVs and robots is driven. As these units will be mobile, travelling across an industrial site, or even out into the urban environment, they will be run off a battery charge. This means that their servos need to operate with the highest possible efficiency - otherwise the amount of work they can do, or the distance they can cover before having to return for recharging will be limited. There is a clear correlation between the productivity of a robot/AGV and the operational effectiveness of its servos. If the associated power losses can be minimised, then significant benefits may be derived.
The accuracy with which the drive shaft moves the wheels of an AGV, or the different axes involved in a robot’s continuously changing orientation, will be dependent upon how well the motion control system tracks the exact position of the rotor. There will be trade-offs in terms of how accurately this position can be determined with respect to the overall system cost and the room that it takes up (accommodating encoders and suchlike). Often in robot/AGV implementations, there will be space and budgetary constraints to be aware of, and in some cases these can be quite acute. The controller IC specified, the encoder and the interface technologies chosen can all be heavily influenced by the particular application and its related logistical requirements. Therefore a flexible platform, where items can be easily swapped, offers the best strategy.
To facilitate the development of motor systems for robot/AGV servos, Toshiba has introduced a Servo Drive Reference Model. Based on Arm®Cortex®-M4 processor technology, this advanced board level solution encompasses all the key building blocks needed for controlling servo motors - with ability for different controller, encoder and I/O modules to be interchanged as requirements dictate.
A whitepaper outlining how to develop high efficiency servo systems for driving robots and AGVs has been published by Toshiba. You can access it by visiting: