- General Top
- SEMICONDUCTOR
- STORAGE
- COMPANY
-
My ToshibaSemicon
- Semiconductor Top
-
ApplicationsAutomotive
Body Electronics
xEV
In-Vehicle Infotainment
Advanced Driver-Assistance Systems (ADAS)
Chassis
IndustrialInfrastructure
BEMS/HEMS
Factory Automation
Commercial Equipment
Consumer/PersonalIoT Equipment
Healthcare
Wearable Device
Mobile
Computer Peripherals
-
ProductsAutomotive Devices
Discrete Semiconductor
Diodes
Transistors
Logic ICs
Analog Devices
- Automotive SmartMCD™ (Integreted SoC Conbining Microcontroller and Driver)
- Automotive Brushless Motor Driver ICs
- Automotive Brushed DC Motor Driver ICs
- Automotive Stepping Motor Driver ICs
- Automotive Driver ICs
- Automotive System Power Supplies ICs
- Automotive audio power amplifier ICs
- Automotive Network Communication
Digital Devices
Wireless Devices
※
 : Products list (parametric search)Power Semiconductors
: Products list (parametric search)Power SemiconductorsSiC Power Devices
※
: Products list (parametric search)Isolators/Solid State RelaysPhotocouplers
Digital Isolators
Solid State Relays
Fiber Optic Transmitting Modules
※
: Products list (parametric search)MOSFETsIGBTs/IEGTsBipolar Transistors※
: Products list (parametric search)Diodes※
: Products list (parametric search)MicrocontrollersMotor Driver ICsIntelligent Power ICs※
: Products list (parametric search)Power Management ICsLinear ICs※
: Products list (parametric search)General Purpose Logic ICsLinear Image SensorsOther Product ICsOther Product ICs
※
: Products list (parametric search) -
Design & Development
Design & Development
Innovation Centre
At the Toshiba Innovation Centre we constantly strive to inspire you with our technologies and solutions. Discover how to place us at the heart of your innovations.
-
Knowledge
Knowledge
Highlighted Topics
Further Materials
Other
- Where To Buy



- Part Number & Keyword Search
- Cross Reference Search
- Parametric Search
- Stock Check & Purchase
This webpage doesn't work with Internet Explorer. Please use the latest version of Google Chrome, Microsoft Edge, Mozilla Firefox or Safari.
require 3 characters or more. Search for multiple part numbers fromhere.
The information presented in this cross reference is based on TOSHIBA's selection criteria and should be treated as a suggestion only. Please carefully review the latest versions of all relevant information on the TOSHIBA products, including without limitation data sheets and validate all operating parameters of the TOSHIBA products to ensure that the suggested TOSHIBA products are truly compatible with your design and application.Please note that this cross reference is based on TOSHIBA's estimate of compatibility with other manufacturers' products, based on other manufacturers' published data, at the time the data was collected.TOSHIBA is not responsible for any incorrect or incomplete information. Information is subject to change at any time without notice.
require 3 characters or more.
Low-Noise Sensorless Field-Oriented Control of Motors via Advanced Hardware & Software
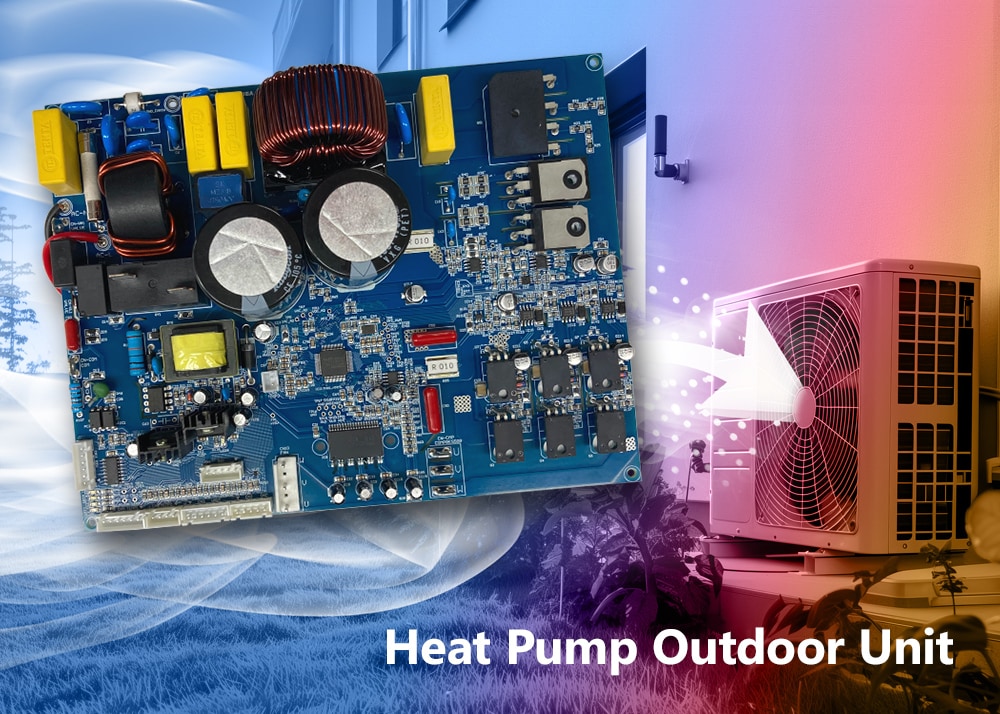
The prevalence of brushless DC (BLDC) motors continues to grow, as new applications for them keep on emerging. Data compiled by Grand View Research projects that the global BLDC market will go through a compound annual growth rate (CAGR) of approximately 6.6% between now and 2027. This will mean that it is worth somewhere in the region of $27 billion by the end of that period.
With BLDCs constituting a large proportion of the world’s total electricity consumption, ensuring that efficient operation is maintained is clearly paramount. Electronic commutation of BLDCs is allowing considerable energy savings to be realised. Though sensor-based systems can offer highly effective BLDC motor control, they are not always appropriate. In a very large proportion of cases, acute space constraints or budgetary concerns will prohibit this approach. Instead sensorless control is achieved via measurement of the induced back EMF.
Through field-oriented control (FOC) it is possible for a smoothly rotating stator magnetic field to be provided. In general, this methodology means that torque ripple is kept to a minimum. The system is thus not subjected to unwanted mechanical stresses and there is very little audible noise produced.
There are four basic steps involved on FOC. These are as follows:
- Measuring of the actual current passing into the stator windings
- Generation of an error signal by comparing the measured current with the desired current
- Amplification of the error signal in order to create a correction voltage
- Modulation of the correction voltage onto the motor terminals
Through this continually updated feedback loop, the motor can be kept running smoothly. It should be noted though that accurately determining rotor positioning without sensor technology (e.g. Hall Effect devices) can prove difficult, and this is particularly true when the rotor is revolving at lower speeds.
Running at these low speeds impacts upon the FOC algorithms' ability to calculate what commutation needs to be applied. Techniques that look to compensate for this will mean that many of the original advantages of using FOC are unfortunately lost - with the application of high-frequency signals causing torque ripple that then leads to acoustic noise and vibrations being generated within the system. This results in efficiency losses being witnessed. In addition, the presence of these high-frequency signals can also be problematic from an electro-magnetic compatibility (EMC) standpoint too.
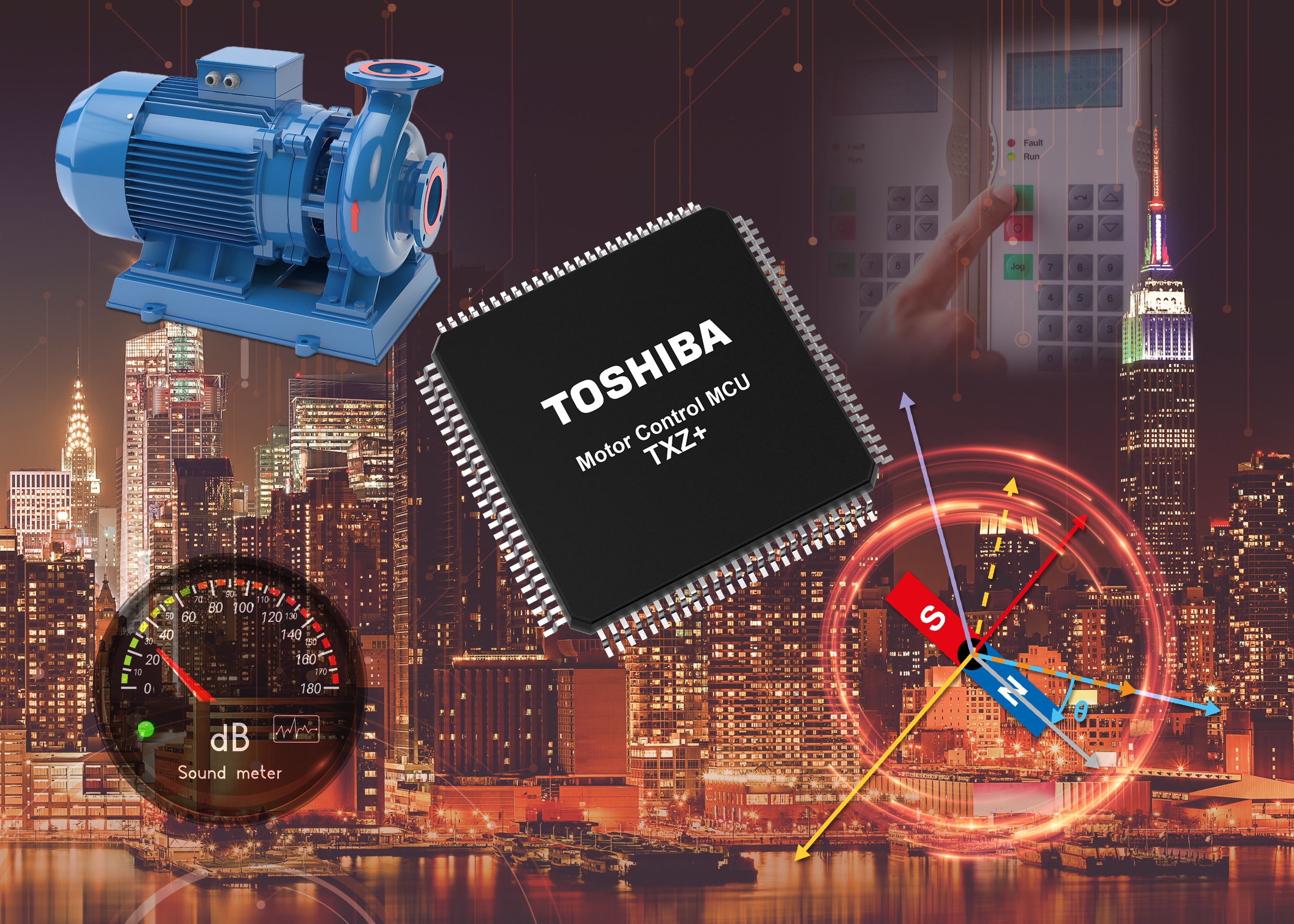
The introduction of Toshiba’s M4K microcontroller unit (MCU) represents a major step forward in efficient BLDC motor control. This device integrates the company’s proprietary Advanced Vector Engine Plus IP (A-VE+) technology, executing all the mathematical calculations required for fully efficient sensorless FOC.
Another innovation is the Advanced Programmable Motor Driver (A-PMD) technology employed. A-PMD means motor PWM outputs can be produced using individual pulse-width modulated (PWM) carriers assigned to each motor phase. Consequently, there is no longer a need for high-frequency signals to be applied when the motor is operating at low speeds (thereby eliminating the vibration and noise issues already outlined). The A-VE+ enabled M4K solution also requires very little processing overhead, once the initial configuration work has been completed.
A whitepaper giving details of this latest approach to FOC has been published by Toshiba. It can be downloaded here: