
- General Top
- SEMICONDUCTOR
- STORAGE
- COMPANY
-
My ToshibaSemicon
- Semiconductor Top
-
ApplicationsAutomotive
Body Electronics
xEV
In-Vehicle Infotainment
Advanced Driver-Assistance Systems (ADAS)
Chassis
IndustrialInfrastructure
BEMS/HEMS
Factory Automation
Commercial Equipment
Consumer/PersonalIoT Equipment
Healthcare
Wearable Device
Mobile
Computer Peripherals
-
ProductsAutomotive Devices
Discrete Semiconductor
Diodes
Transistors
Logic ICs
Analog Devices
Digital Devices
Wireless Devices
※
 : Products list (parametric search)Power Semiconductors
: Products list (parametric search)Power SemiconductorsSiC Power Devices
※
: Products list (parametric search)Isolators/Solid State RelaysPhotocouplers
Digital Isolators
Solid State Relays
Fiber Optic Transmitting Modules
※
: Products list (parametric search)MOSFETsIGBTs/IEGTsBipolar Transistors※
: Products list (parametric search)Diodes※
: Products list (parametric search)MicrocontrollersMotor Driver ICsIntelligent Power ICs※
: Products list (parametric search)Power Management ICsLinear ICs※
: Products list (parametric search)General Purpose Logic ICsLinear Image SensorsOther Product ICsOther Product ICs
※
: Products list (parametric search) -
Design & Development
-
Knowledge
- Where To Buy
- Part Number & Keyword Search
- Cross Reference Search
- Parametric Search
- Stock Check & Purchase
This webpage doesn't work with Internet Explorer. Please use the latest version of Google Chrome, Microsoft Edge, Mozilla Firefox or Safari.
require 3 characters or more. Search for multiple part numbers fromhere.
The information presented in this cross reference is based on TOSHIBA's selection criteria and should be treated as a suggestion only. Please carefully review the latest versions of all relevant information on the TOSHIBA products, including without limitation data sheets and validate all operating parameters of the TOSHIBA products to ensure that the suggested TOSHIBA products are truly compatible with your design and application.Please note that this cross reference is based on TOSHIBA's estimate of compatibility with other manufacturers' products, based on other manufacturers' published data, at the time the data was collected.TOSHIBA is not responsible for any incorrect or incomplete information. Information is subject to change at any time without notice.
require 3 characters or more.
CAN (Controller Area Network)
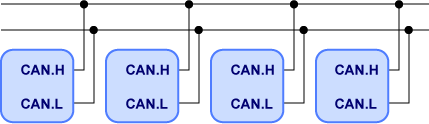
CAN is a serial interface which is mainly used inside a motor vehicle. Strong noise-immunity is realized with its double signal lines. CAN does not have any clock lines, which means it is an asynchronous interface. Only two signal lines configure the whole network.
The voltage difference between the double signals, CAN.H and CAN.L, represents the data. “CAN.H-high and CAN.L-low” is assigned to data “0”, and “CAN.H = CAN.L”, data “1”. Noises will be cancelled because the transferred data is determined by the voltage difference of the pair of complementary signals.
A data transmitter and its receiver in CAN need to synchronize each other without any clock signals. Once a transmitter sends the first “0” as a start bit, the other all receivers synchronize the transition edge of the start bit.
CAN does not have any master-slave relation. Every interface unit is given each priority order (Identifier) to prevent from competition on the signal lines. When more than two units would start to transfer at the same time and they output their Identifiers after their start bits, each unit which receives a higher Identifier than its own immediately stops the data output. This guarantees that the data of the highest priority unit only can be transferred.
Lineup
Microcontrollers products incorporating a CAN interface are displayed.
Queries about purchasing, sampling and IC reliability
Stock Check & Purchase
require 3 characters or more.