
-
My ToshibaSemicon
- 반도체 탑
-
애플리케이션Automotive
Body Electronics
xEV
In-Vehicle Infotainment
Advanced Driver-Assistance Systems (ADAS)
Chassis
IndustrialInfrastructure
BEMS/HEMS
Factory Automation
Commercial Equipment
Consumer/PersonalIoT Equipment
Healthcare
Wearable Device
Mobile
Computer Peripherals
-
제품자동차 디바이스
Discrete Semiconductor
다이오드
트랜지스터
로직 IC
Analog Devices
Digital Devices
Wireless Devices
※
 : Products list (parametric search)파워반도체
: Products list (parametric search)파워반도체※
: Products list (parametric search)Isolators/Solid State RelaysPhotocouplers
Digital Isolators
Solid State Relays
Fiber Optic Transmitting Modules
※
: Products list (parametric search)MOSFETsIGBTs/IEGTs바이폴라 트랜지스터※
: Products list (parametric search)다이오드※
: Products list (parametric search)마이크로컨트롤러모터 드라이버 ICIntelligent Power ICs※
: Products list (parametric search)전원관리IC리니어 IC※
: Products list (parametric search)범용로직IC리니어 이미지 센서기타 제품용 IC기타 제품용 IC
※
: Products list (parametric search) -
개발/설계 지원
-
기술 자료
- 구매처


- 부품 번호 & 키워드 검색
- 상호 참조 검색
- 파라미터 검색
- 재고 확인 및 구매
This webpage doesn't work with Internet Explorer. Please use the latest version of Google Chrome, Microsoft Edge, Mozilla Firefox or Safari.
3글자 이상 입력하세요. Search for multiple part numbers fromhere.
The information presented in this cross reference is based on TOSHIBA's selection criteria and should be treated as a suggestion only. Please carefully review the latest versions of all relevant information on the TOSHIBA products, including without limitation data sheets and validate all operating parameters of the TOSHIBA products to ensure that the suggested TOSHIBA products are truly compatible with your design and application.Please note that this cross reference is based on TOSHIBA's estimate of compatibility with other manufacturers' products, based on other manufacturers' published data, at the time the data was collected.TOSHIBA is not responsible for any incorrect or incomplete information. Information is subject to change at any time without notice.
3글자 이상 입력하세요.
Countermeasures for Metastability
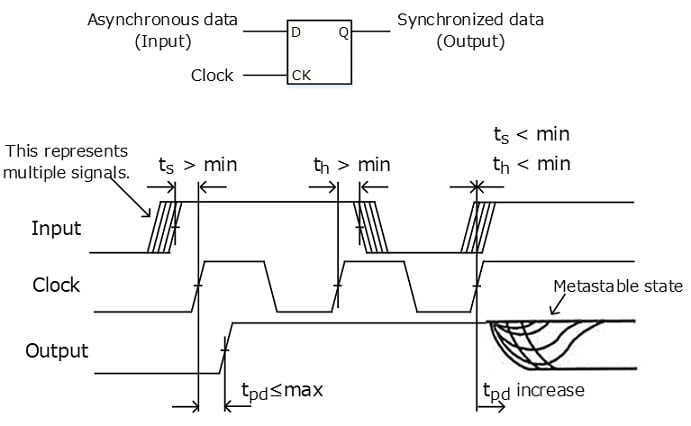
The output of a synchronous sequential circuit can potentially persist in an unstable equilibrium called a metastable state, depending on the timing of a data signal to be latched relative to the clock signal.
A sequential circuit enters a metastable state when its input setup and hold time (ts and th) requirements shown in the datasheet are not satisfied.
Metastability potentially occurs when an active input (e.g., a clock signal) and a passive input (e.g., a data signal) are asynchronous to each other. To prevent sequential circuits from entering a metastable state, the recommended timing conditions shown in the datasheet must be satisfied.
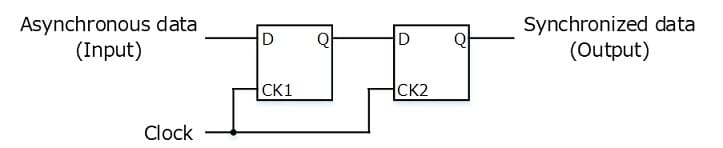
For example, when the CK and D inputs are asynchronous, they can be synchronized as shown below.
In this case, however, care should be exercised as to the cycle period and propagation delay of CK.
If they are close, the data signal might not propagate to the second flip-flop.
The synchronizer shown in Figure 5.3 consists of two flip-flops. The first flip-flop prevents an increase in tpd and a hazard from being transferred to the output of the second flip-flop.
Even in this case, care is needed when the phase difference between CK1 and CK2 is close to the CK-to-Q delay (tpd) of the first flip-flop.
Note: If the two flip-flops cannot operate from the same clock, metastability is avoidable by creating an inverted clock synchronous to CK1 and using it as CK2 (e.g., CK2 = /CK1).
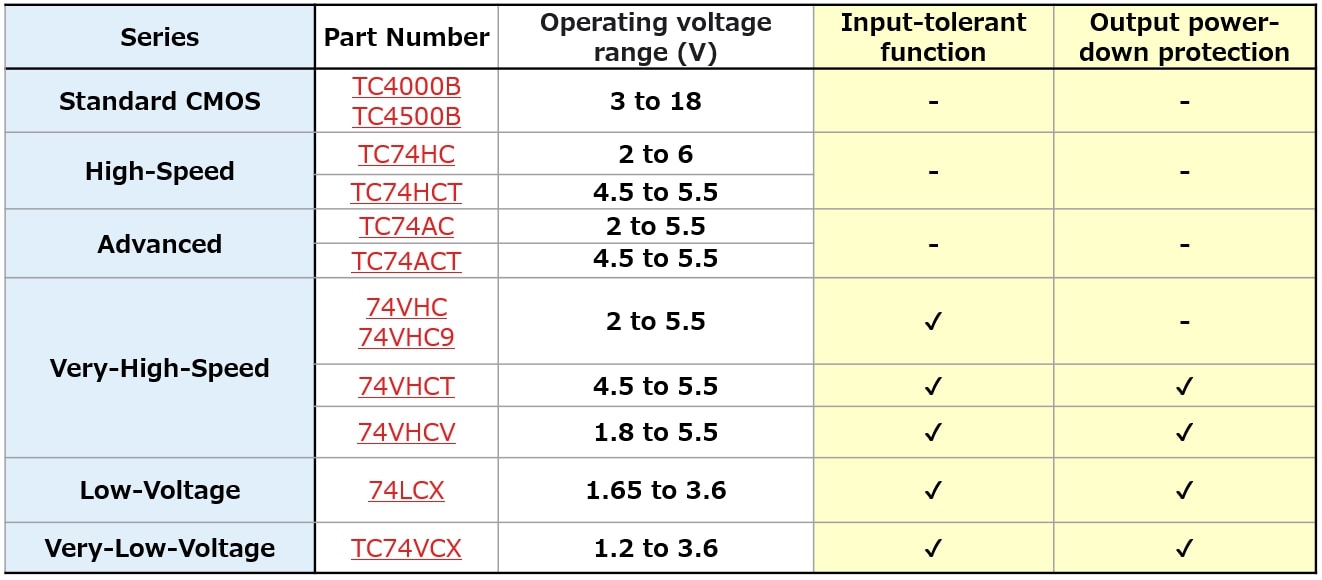
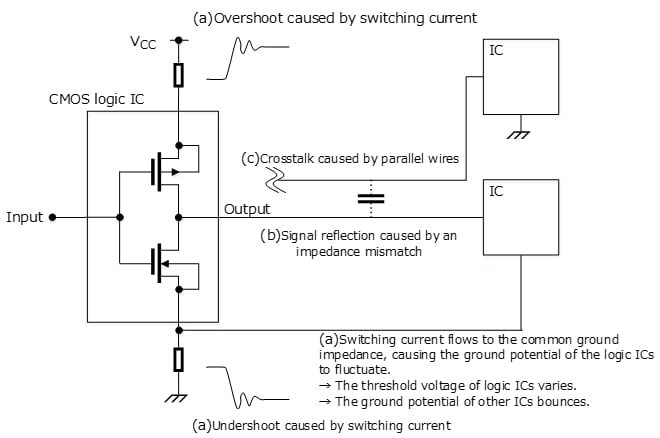
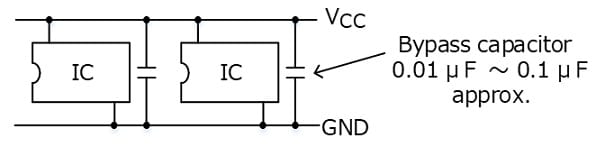
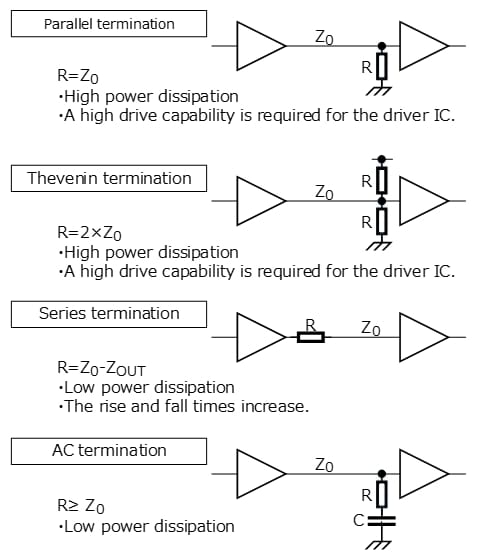
Usage Considerations of CMOS Logic ICs


Products
Related information
- Application Notes
- FAQ