
- General Top
- SEMICONDUCTOR
- STORAGE
- COMPANY
-
My ToshibaSemicon
- Semiconductor Top
-
ApplicationsAutomotive
Body Electronics
xEV
In-Vehicle Infotainment
Advanced Driver-Assistance Systems (ADAS)
Chassis
IndustrialInfrastructure
BEMS/HEMS
Factory Automation
Commercial Equipment
Consumer/PersonalIoT Equipment
Healthcare
Wearable Device
Mobile
Computer Peripherals
-
ProductsAutomotive Devices
Discrete Semiconductor
Diodes
Transistors
Logic ICs
Analog Devices
Digital Devices
Wireless Devices
※
 : Products list (parametric search)Power Semiconductors
: Products list (parametric search)Power SemiconductorsSiC Power Devices
※
: Products list (parametric search)Isolators/Solid State RelaysPhotocouplers
Digital Isolators
Solid State Relays
Fiber Optic Transmitting Modules
※
: Products list (parametric search)MOSFETsIGBTs/IEGTsBipolar Transistors※
: Products list (parametric search)Diodes※
: Products list (parametric search)MicrocontrollersMotor Driver ICsIntelligent Power ICs※
: Products list (parametric search)Power Management ICsLinear ICs※
: Products list (parametric search)General Purpose Logic ICsLinear Image SensorsOther Product ICsOther Product ICs
※
: Products list (parametric search) -
Design & Development
-
Knowledge
- Where To Buy


- Part Number & Keyword Search
- Cross Reference Search
- Parametric Search
- Stock Check & Purchase
This webpage doesn't work with Internet Explorer. Please use the latest version of Google Chrome, Microsoft Edge, Mozilla Firefox or Safari.
require 3 characters or more. Search for multiple part numbers fromhere.
The information presented in this cross reference is based on TOSHIBA's selection criteria and should be treated as a suggestion only. Please carefully review the latest versions of all relevant information on the TOSHIBA products, including without limitation data sheets and validate all operating parameters of the TOSHIBA products to ensure that the suggested TOSHIBA products are truly compatible with your design and application.Please note that this cross reference is based on TOSHIBA's estimate of compatibility with other manufacturers' products, based on other manufacturers' published data, at the time the data was collected.TOSHIBA is not responsible for any incorrect or incomplete information. Information is subject to change at any time without notice.
require 3 characters or more.
Ultrasonic Motor Control Technology: High Resolution Control by MCU
An ultrasonic motor rotates a rotor by using ultrasonic waves with high frequencies more than 20,000Hz which a human cannot hear. This article will briefly explain how ultrasonic motor operates using examples and introduce the way for controlling ultrasonic motors by microcontrollers.
An ultrasonic motor rotates a rotor by using ultrasonic waves with high frequencies more than 20,000Hz which a human cannot hear. The ultrasonic motor generates ultrasonic waves using piezoelectric elements, while conventional motors use permanent magnets or coils to rotate a rotor. The piezoelectric element swells and contracts depending upon a difference of electric potential between two terminals, and this frequent swelling and contracting generate the ultrasonic waves.
Ultrasonic motors are so physically flexible that a very thin motor or a liner motor can be realized easily. A recently-developed product is a ring motor which drives interchangeable lenses on a single-lens reflex camera or a mirror-less camera. Auto-focus is done by rotating the lens, and the rotation is brought by the ultrasonic ring motor.
How do ultrasonic motors move?
Let’s see a linear ultrasonic motor.
It is briefly explained how a straight-shape ultrasonic motor operates.
Pluralities of piezoelectric elements are pasted at equal-distance on the bottom of a long and thin stick. Every other piezoelectric element is connected to a terminal. The two terminals are given AC voltage supplies whose waveform phases are reversed each other. The piezoelectric elements swell and contract depending on the supplied voltages and generate an ultrasonic wave inside the stick. And the ultrasonic wave transfers to the top surface of the stick. The conductivity depends on several parameters as the size of the piezoelectric element, the distance between the neighboring elements, the supply voltage and its frequency, the thickness and material of the stick, and so on.Those parameters will be determined to achieve most effective wave propagation.
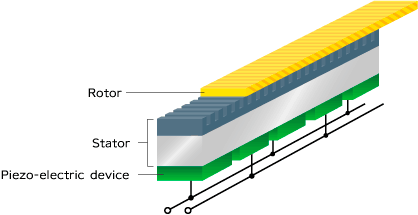
On the top of the stick there are many shallow dents.
A sine wave is generated on the surface of the stick by applying AC voltage to the piezoelectric elements on the bottom of the stick.
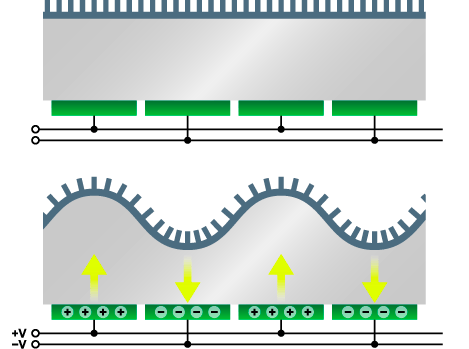
While the sine wave moves, a movement of the opposite direction to traveling the wave at the highest point of the wave and that of the same direction to the wave at the lowest point occur. One point on the surface of the stick draws an ellipse anticlockwise if the sine wave goes from left to right. A small and flat plate, a rotor, on the surface runs to the opposite direction to the sine wave, from left to right.
That is the explanation of the operation of the ultrasonic motor.
You have understood how the
Ultra sonic motor operates, I hope.
It is surprising the moving direction
of the rotor is opposite to the direction
of the ultrasonic wave, isn’t it.