
-
My ToshibaSemicon
- セミコンダクタートップ
-
アプリケーション車載
ボディエレクトロニクス
xEV
インフォテインメント
産業用機器業務用機器
民生/個人用機器 -
製品車載用デバイス
ディスクリート半導体
ダイオード
トランジスター
汎用ロジックIC
アナログデバイス
※
 : 製品一覧(パラメトリックサーチ)パワー半導体
: 製品一覧(パラメトリックサーチ)パワー半導体※
: 製品一覧(パラメトリックサーチ)アイソレーター/ソリッドステートリレー(SSR)フォトカプラー
デジタルアイソレーター
ソリッドステートリレー (SSR)
光伝送モジュール
※
: 製品一覧(パラメトリックサーチ)MOSFETIGBT/IEGTバイポーラートランジスター※
: 製品一覧(パラメトリックサーチ)ダイオード※
: 製品一覧(パラメトリックサーチ)マイクロコントローラーモータードライバーインテリジェントパワーIC※
: 製品一覧(パラメトリックサーチ)パワーマネージメントICリニアーIC※
: 製品一覧(パラメトリックサーチ)汎用ロジックICリニアーイメージセンサーその他専用ICその他専用IC
※
: 製品一覧(パラメトリックサーチ) -
開発/設計支援
-
知る/学ぶ
- ご購入



- 品番・キーワード検索
- クロスリファレンス検索
- パラメトリック検索
- オンラインディストリビューター在庫検索
本機能は Internet Explorer 11 ではご利用頂けません。最新のGoogle Chrome, Microsoft Edge, Mozilla Firefox, Safariにてご利用ください。
品番は3文字以上指定して下さい。 複数品番の検索はこちら。
クロスリファレンスでは参考品名が表示されますので、製品に関する最新の情報をデータシート等でご確認の上、単独およびシステム全体で十分に評価し、お客様の責任において適用可否を判断してください。参考にしている情報は、取得した時点の各メーカーの公式情報に基づいた当社の推定によるものです。当社は、情報の正確性、完全性に関して一切の保証をいたしません。また、情報は予告なく変更されることがあります。
品番は3文字以上指定して下さい。
オンラインディストリビューターが保有する東芝製品の在庫照会および購入が行えるサービスです。
超音波モーター制御技術-MCUによる高分解能コントロール
超音波モーターの動作原理をわかりやすく解説しています。また、超音波モーターを高分解能で制御する方法と、その用途に最適な東芝TX03シリーズのMCUをご紹介いたします。
超音波モーターは、人間の耳には聞こえない超音波(周波数20kHz以上)を使ってローターを移動させるモーターです。通常のモーターは永久磁石やコイルを用いてローターを回転させますが、超音波モーターでは超音波の発生のために圧電素子を使用します。圧電素子は2つの端子に電位差を与えますと、電位の向きによって膨張、または収縮します。この膨張・収縮により超音波が発生します。
超音波モーターはモーター自体の形に自由度があり、従来よりもはるかに薄いモーターや、まっすぐなモーターなどを作ることができます。最近の使用例では、一眼レフやミラーレス・カメラの交換レンズが挙げられます。焦点を合わせるため、レンズが回転しながら前後に動きますが、この、レンズの回転運動をさせるためにリング状の超音波モーターが使われています。
超音波モーターってどう動くのでしょうか?
真っ直ぐな超音波モーターで説明します。
直線形の超音波モーターがどのように動作するのかを説明します。
まず、細長い四角い棒の底面に、等間隔に圧電素子を貼り付けます。圧電素子を1個おきにそれぞれつなぎ、電極を付けます。この電極に+、および、-の電位を交互に与えます。すると、圧電素子が上下に震動し、その震動が細棒の上面にまで伝わります。圧電素子の大きさ、並べ方、与える電圧値、その電圧の周波数、細棒の材質や厚さなどを決めて、もっとも効率よく震動が伝わるようにします。
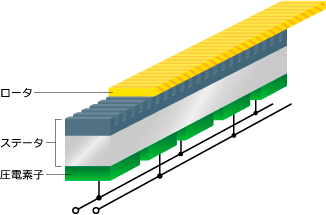
細棒の上面には規則正しく並んだ突起を付けておきます。
圧電素子に電圧を加え、細棒の表面に正弦波を生成します。
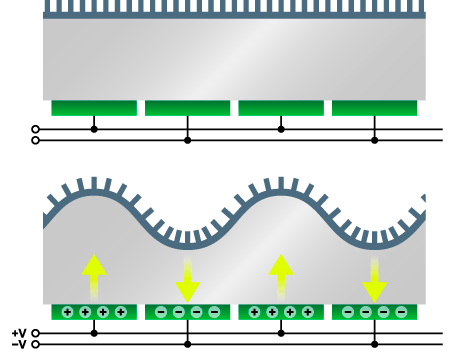
正弦波が右に進むにつれて、突起が次々に動いていきますが、その突起の頂点を追いかけると、反時計回りの楕円運動になっているのがわかります。
この細棒(ステーター)の上に細板(ローター)を置くと、その板は波の進行方向と反対方向、つまり、右から左の方向に動きます。
これが超音波モーターの動作原理の概要です。
動作原理はわかりましたか?
超音波の進む方向と逆の方向にローターが動くのがおもしろいですね。