
- General Top
- SEMICONDUCTOR
- STORAGE
- COMPANY
-
My ToshibaSemicon
- Semiconductor Top
-
ApplicationsAutomotive
Body Electronics
xEV
In-Vehicle Infotainment
Advanced Driver-Assistance Systems (ADAS)
Chassis
IndustrialInfrastructure
BEMS/HEMS
Factory Automation
Commercial Equipment
Consumer/PersonalIoT Equipment
Healthcare
Wearable Device
Mobile
Computer Peripherals
-
ProductsAutomotive Devices
Discrete Semiconductor
Diodes
Transistors
Logic ICs
Analog Devices
- Automotive SmartMCD™ (Integreted SoC Conbining Microcontroller and Driver)
- Automotive Brushless Motor Driver ICs
- Automotive Brushed DC Motor Driver ICs
- Automotive Stepping Motor Driver ICs
- Automotive Driver ICs
- Automotive System Power Supplies ICs
- Automotive audio power amplifier ICs
- Automotive Network Communication
Digital Devices
Wireless Devices
※
 : Products list (parametric search)Power Semiconductors
: Products list (parametric search)Power SemiconductorsSiC Power Devices
※
: Products list (parametric search)Isolators/Solid State RelaysPhotocouplers
Digital Isolators
Solid State Relays
Fiber Optic Transmitting Modules
※
: Products list (parametric search)MOSFETsIGBTs/IEGTsBipolar Transistors※
: Products list (parametric search)Diodes※
: Products list (parametric search)MicrocontrollersMotor Driver ICsIntelligent Power ICs※
: Products list (parametric search)Power Management ICsLinear ICs※
: Products list (parametric search)General Purpose Logic ICsLinear Image SensorsOther Product ICsOther Product ICs
※
: Products list (parametric search) -
Design & Development
-
Knowledge
- Where To Buy


- Part Number & Keyword Search
- Cross Reference Search
- Parametric Search
- Stock Check & Purchase
This webpage doesn't work with Internet Explorer. Please use the latest version of Google Chrome, Microsoft Edge, Mozilla Firefox or Safari.
require 3 characters or more. Search for multiple part numbers fromhere.
The information presented in this cross reference is based on TOSHIBA's selection criteria and should be treated as a suggestion only. Please carefully review the latest versions of all relevant information on the TOSHIBA products, including without limitation data sheets and validate all operating parameters of the TOSHIBA products to ensure that the suggested TOSHIBA products are truly compatible with your design and application.Please note that this cross reference is based on TOSHIBA's estimate of compatibility with other manufacturers' products, based on other manufacturers' published data, at the time the data was collected.TOSHIBA is not responsible for any incorrect or incomplete information. Information is subject to change at any time without notice.
require 3 characters or more.
EtherMAC (Ethernet Media Access Control)
EtherMAC is a part of Ethernet interface. It is not easy to introduce full function of Ethernet because the interface has very complicated structure. This is just a brief explanation regarding Ethernet.
Ethernet can be mainly divided into four hierarchical layers which are physical layer, data link layer, network layer and the upper layers. EtherMAC handles the lowest two layers, physical and data link ones.
An Ethernet cable consists of four signal wires. Two twisted wires are used for output data and another two twisted wires, for input data. This cable has good noise immunity even without electric shield. There are no clock lines so Ethernet is an asynchronous interface. In order to comprehend the concept of Ethernet, 10Base-T is introduced here even though 100Base-TX is the most popular version today because 10Base-T is fundamental and much simpler than 100Base-TX.
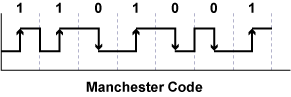
10Base-T is an interface which has 10Mbps transfer rate and Base band format with using a twist pair cable. Manchester Code format is applied to the signal transfer. In Manchester Code data “1” and “0” are defined with rise transition and fall one, respectively.
Ethernet does not have any clock lines. A receiver and a transmitter have to synchronize each other, the same as CAN and USB interfaces. The transmitter sends 56 bit continuous pulses preceding data only to synchronize the receiver with the transmitter.
Ethernet has no such hierarchy structure as Host-and-Device relation which is essential in USB. When one unit of the interface would like to output data, the line must be vacant. The unit has to wait if another unit occupies the line. Even though the unit has ensured the line is available and started to transmit data, a collision will occur if one of the other units starts to send data coincidentally. Once the collision occurs, all units stop sending their data and wait for the vacancy of the line. And one unit will start to transmit its data. But another collision occurs because other units would do the same. In order to prevent such permanent collisions, Ethernet has a countermeasure against the collision. When a collision happens, the wait times for the transmitters are determined by random numbers. This is effective for the units which made the collision. But a new unit might make a collision when one of the previous units starts to transmit the data again. One unit can try to send the same data 16 times at a maximum. This is one of the best arbitration methods in the system without Master-and-Slave relation to share communication responsibility.
Lineup
Microcontrollers products incorporating an EtherMAC interface are displayed.
Queries about purchasing, sampling and IC reliability
Stock Check & Purchase
require 3 characters or more.
Through this website you are able to proceed to the website of our distributors ("Third Party Website") which is not under the control of Toshiba Corporation and its subsidiaries and affiliates (collectively "Toshiba"). The Third Party Website is made available to you as a convenience only and you agree to use the Third Party Website at your own risk. The link of the Third Party Website does not necessarily imply a recommendation or an endorsement by Toshiba of the Third Party Website. Please be aware that Toshiba is not responsible for any transaction done through the Third Party Website, and such transactions shall be subject to terms and conditions which may be provided in the Third Party Website.