- General Top
- SEMICONDUCTOR
- STORAGE
- COMPANY
-
My ToshibaSemicon
- Semiconductor Top
-
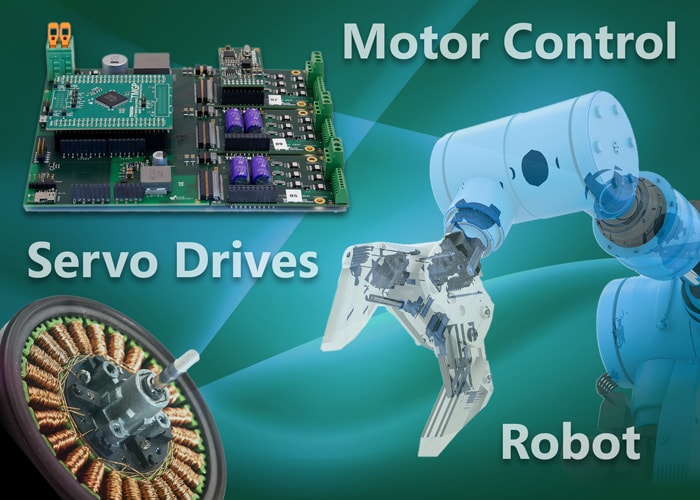
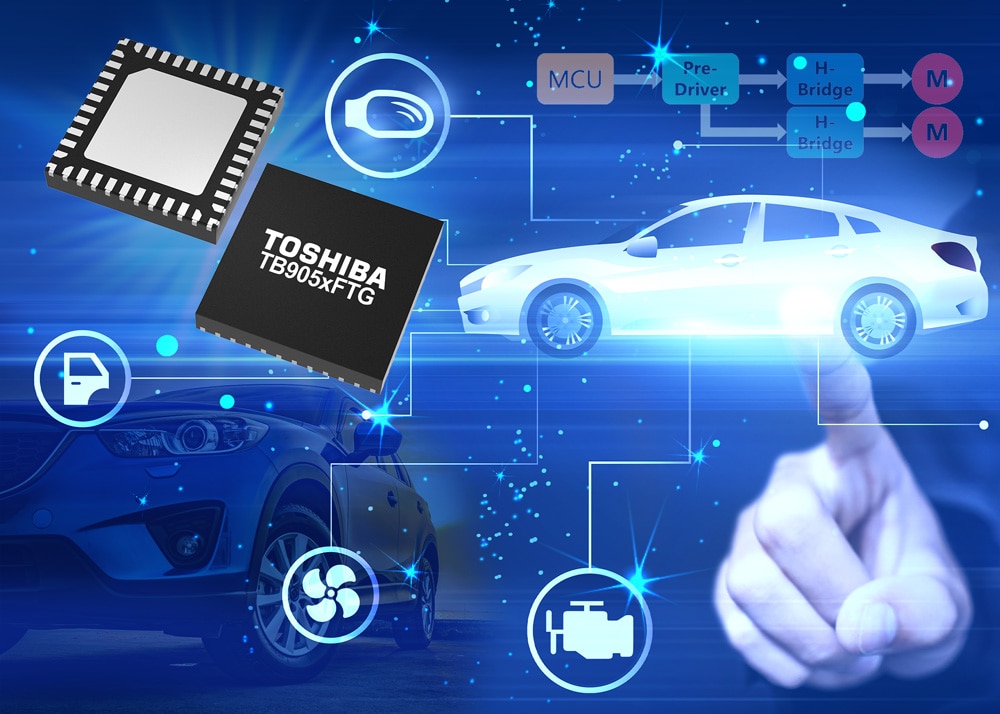
ApplicationsAutomotive
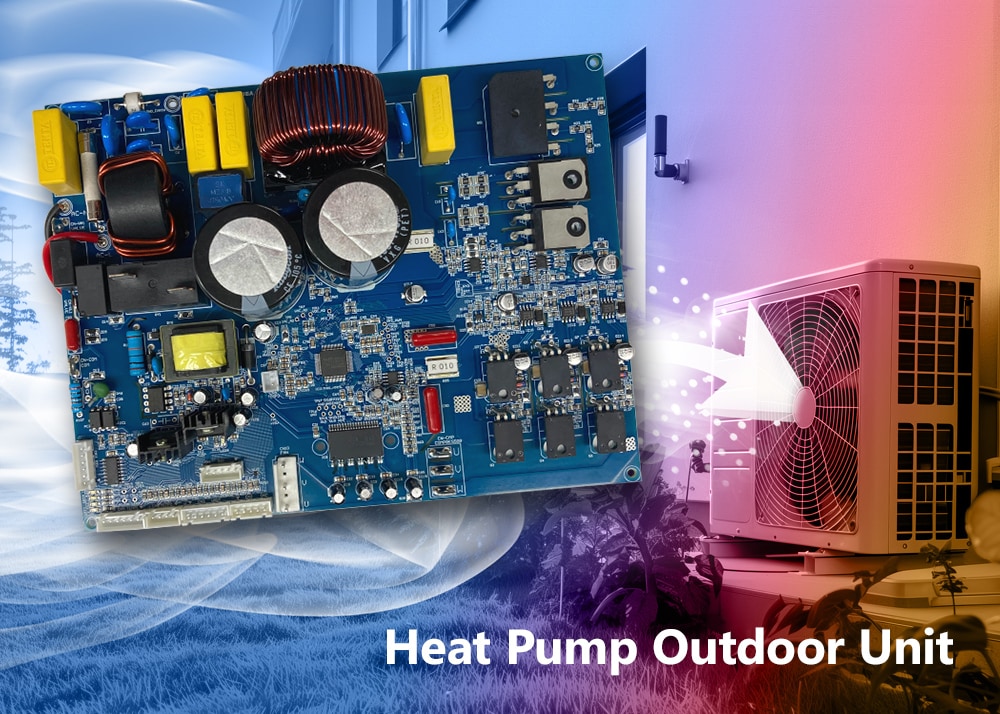
Body Electronics
xEV
In-Vehicle Infotainment
Advanced Driver-Assistance Systems (ADAS)
Chassis
IndustrialInfrastructure
BEMS/HEMS
Factory Automation
Commercial Equipment
Consumer/PersonalIoT Equipment
Healthcare
Wearable Device
Mobile
Computer Peripherals
-
ProductsAutomotive Devices
Discrete Semiconductor
Diodes
Transistors
Logic ICs
Analog Devices
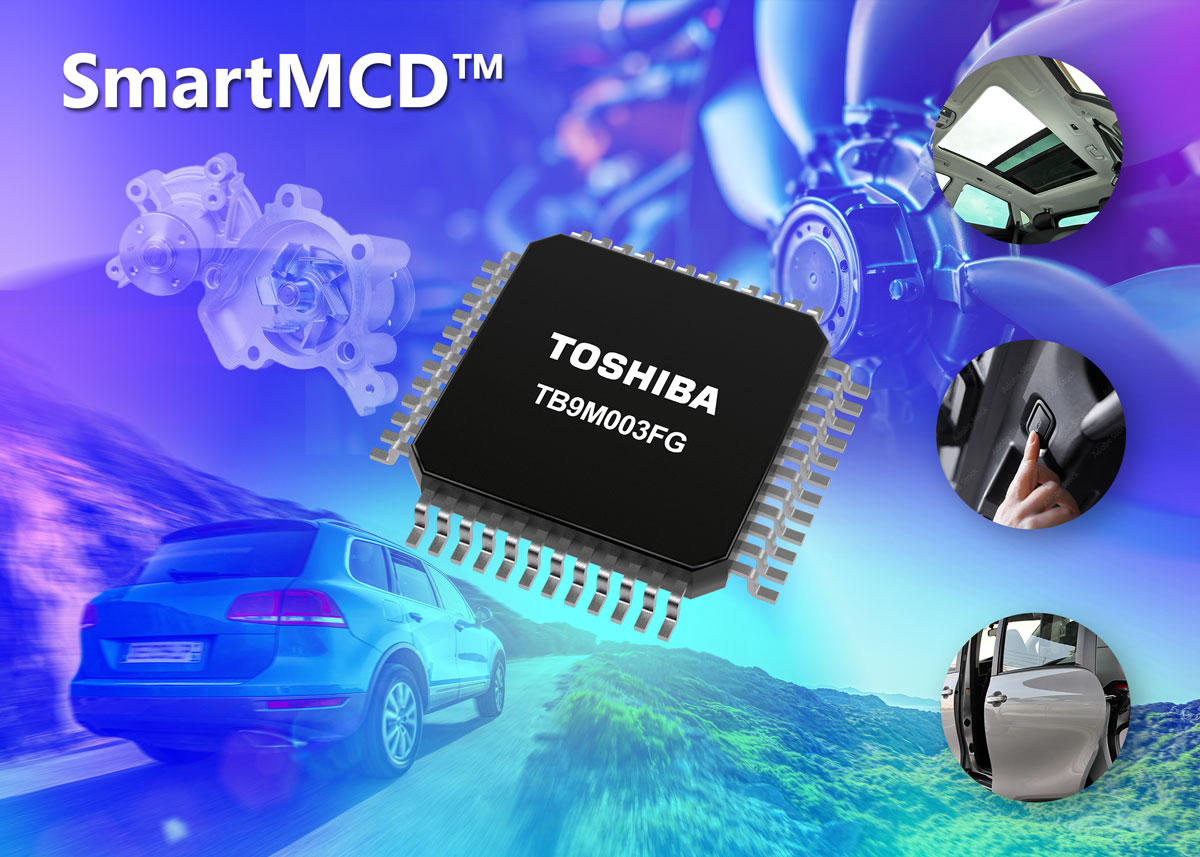
- Automotive SmartMCD™ (Integreted SoC Conbining Microcontroller and Driver)
- Automotive Brushless Motor Driver ICs
- Automotive Brushed DC Motor Driver ICs
- Automotive Stepping Motor Driver ICs
- Automotive Driver ICs
- Automotive System Power Supplies ICs
- Automotive audio power amplifier ICs
- Automotive Network Communication
Digital Devices
Wireless Devices
※
 : Products list (parametric search)Power Semiconductors
: Products list (parametric search)Power SemiconductorsSiC Power Devices
※
: Products list (parametric search)Isolators/Solid State RelaysPhotocouplers
Digital Isolators
Solid State Relays
Fiber Optic Transmitting Modules
※
: Products list (parametric search)MOSFETsIGBTs/IEGTsBipolar Transistors※
: Products list (parametric search)Diodes※
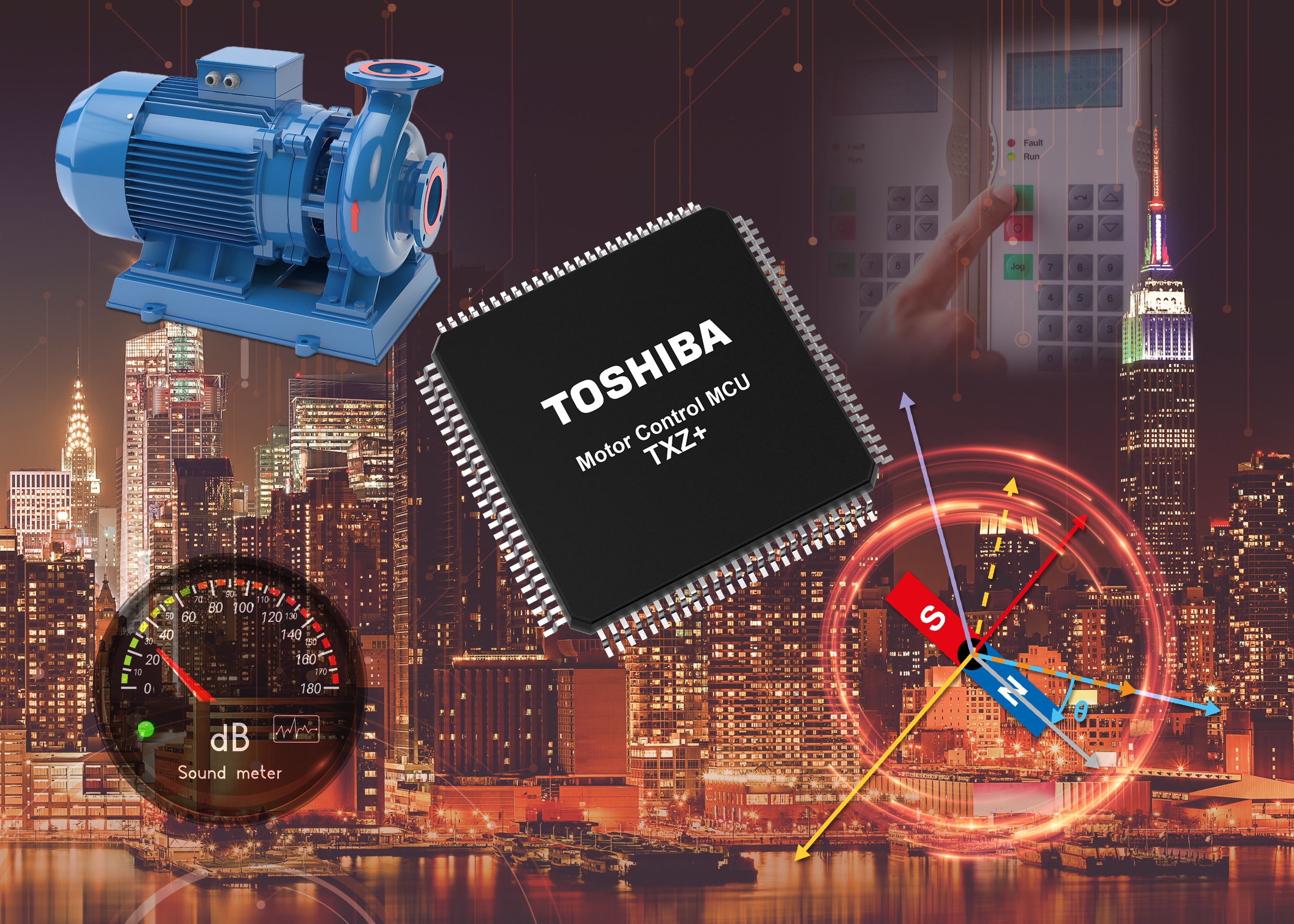
: Products list (parametric search)MicrocontrollersMotor Driver ICsIntelligent Power ICs※
: Products list (parametric search)Power Management ICsLinear ICs※
: Products list (parametric search)General Purpose Logic ICsLinear Image SensorsOther Product ICsOther Product ICs
※
: Products list (parametric search) -
Design & Development
Design & Development
Innovation Centre
At the Toshiba Innovation Centre we constantly strive to inspire you with our technologies and solutions. Discover how to place us at the heart of your innovations.
-
Knowledge
Knowledge
Highlighted Topics
Further Materials
Other
- Where To Buy



- Part Number & Keyword Search
- Cross Reference Search
- Parametric Search
- Stock Check & Purchase
This webpage doesn't work with Internet Explorer. Please use the latest version of Google Chrome, Microsoft Edge, Mozilla Firefox or Safari.
require 3 characters or more. Search for multiple part numbers fromhere.
The information presented in this cross reference is based on TOSHIBA's selection criteria and should be treated as a suggestion only. Please carefully review the latest versions of all relevant information on the TOSHIBA products, including without limitation data sheets and validate all operating parameters of the TOSHIBA products to ensure that the suggested TOSHIBA products are truly compatible with your design and application.Please note that this cross reference is based on TOSHIBA's estimate of compatibility with other manufacturers' products, based on other manufacturers' published data, at the time the data was collected.TOSHIBA is not responsible for any incorrect or incomplete information. Information is subject to change at any time without notice.
require 3 characters or more.
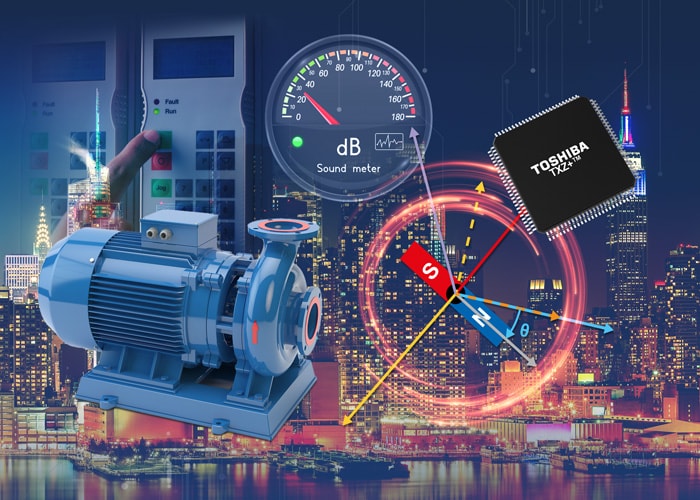
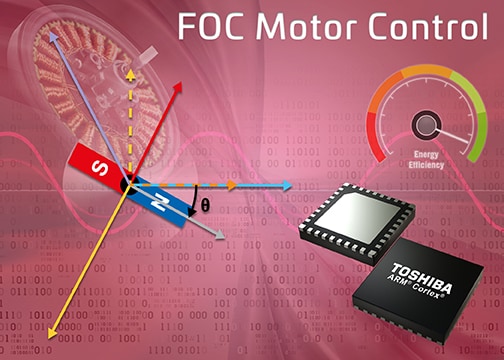
Making Field-Oriented Control of motors simple

The move from mechanical to electronically controlled commutation of motors, coupled with new battery technologies, has opened up a wide range of new applications. Microcontrollers are often the best choice for implementing the motor control since their features are also required to implement other features of the end application. This is made especially challenging when considering the hard-real-time demands of electronically commutating a motor.
Many processing solutions leverage either a digital signal processing (DSP) architecture, or utilize some sort of DSP instruction set extensions or co-processor, in order to efficiently implement the necessary control algorithms. Despite this processing power, the demands of motor control and its need for determinism make it difficult to schedule other tasks effectively.
The reason for turning to DSPs for motor control lies with the type of mathematics employed in the algorithms of sinusoidal commutation. Typically, a Field-Oriented Control (FOC) algorithm controls a variable frequency sinusoid that aims to keep the rotor and stator magnetic fields of the motor at 90 degrees under all conditions. Two parameters, field flux linkage and torque, need to be derived and controlled optimally to achieve this.
In a sensorless implementation the process starts with measurement of the current in the three windings of the motor. These are then converted into two-phase currents using a Clarke transform. The rotating coordinates, representing the field flux linkage and torque, are derived with a Park transform. The resulting values can be compared with target values and a compensating error signal, typically provided by a proportional-integral (PI) controller. The three drive currents for the motor are then calculated by reversing the transforms performed previously.
Recognizing the complexity involved in a software implementation of such mathematics, devices such as the TXZ family of Arm® Cortex® based MCUs have integrated it into a hardware peripheral known as a Vector Engine (VE). The latest iteration of this peripheral not only implements the Park-Clarke transformations required for motor control but is also tightly coupled with the other on-chip peripheral needed for accurate motor control. This includes the pulse-width-modulation (PWM) timers and the analog-to-digital converter (ADC). Such tight integration simplifies configuration, ensures accuracy and efficiency in control, and leaves the processing core with much more time to execute other application functions.
To find out more about how these microcontrollers can be used to develop energy efficient motor control, take a look at our latest whitepaper: