- General Top
- SEMICONDUCTOR
- STORAGE
- COMPANY
-
My ToshibaSemicon
- Semiconductor Top
-
ApplicationsAutomotive
Body Electronics
xEV
In-Vehicle Infotainment
Advanced Driver-Assistance Systems (ADAS)
Chassis
IndustrialInfrastructure
BEMS/HEMS
Factory Automation
Commercial Equipment
Consumer/PersonalIoT Equipment
Healthcare
Wearable Device
Mobile
Computer Peripherals
-
ProductsAutomotive Devices
Discrete Semiconductor
Diodes
Transistors
Logic ICs
Analog Devices
- Automotive SmartMCD™ (Integreted SoC Conbining Microcontroller and Driver)
- Automotive Brushless Motor Driver ICs
- Automotive Brushed DC Motor Driver ICs
- Automotive Stepping Motor Driver ICs
- Automotive Driver ICs
- Automotive System Power Supplies ICs
- Automotive audio power amplifier ICs
- Automotive Network Communication
Digital Devices
Wireless Devices
※
 : Products list (parametric search)Power Semiconductors
: Products list (parametric search)Power SemiconductorsSiC Power Devices
※
: Products list (parametric search)Isolators/Solid State RelaysPhotocouplers
Digital Isolators
Solid State Relays
Fiber Optic Transmitting Modules
※
: Products list (parametric search)MOSFETsIGBTs/IEGTsBipolar Transistors※
: Products list (parametric search)Diodes※
: Products list (parametric search)MicrocontrollersMotor Driver ICsIntelligent Power ICs※
: Products list (parametric search)Power Management ICsLinear ICs※
: Products list (parametric search)General Purpose Logic ICsLinear Image SensorsOther Product ICsOther Product ICs
※
: Products list (parametric search) -
Design & Development
Design & Development
Innovation Centre
At the Toshiba Innovation Centre we constantly strive to inspire you with our technologies and solutions. Discover how to place us at the heart of your innovations.
-
Knowledge
Knowledge
Highlighted Topics
Further Materials
Other
- Where To Buy



- Part Number & Keyword Search
- Cross Reference Search
- Parametric Search
- Stock Check & Purchase
This webpage doesn't work with Internet Explorer. Please use the latest version of Google Chrome, Microsoft Edge, Mozilla Firefox or Safari.
require 3 characters or more. Search for multiple part numbers fromhere.
The information presented in this cross reference is based on TOSHIBA's selection criteria and should be treated as a suggestion only. Please carefully review the latest versions of all relevant information on the TOSHIBA products, including without limitation data sheets and validate all operating parameters of the TOSHIBA products to ensure that the suggested TOSHIBA products are truly compatible with your design and application.Please note that this cross reference is based on TOSHIBA's estimate of compatibility with other manufacturers' products, based on other manufacturers' published data, at the time the data was collected.TOSHIBA is not responsible for any incorrect or incomplete information. Information is subject to change at any time without notice.
require 3 characters or more.
How do hardware accelerators simplify motor control applications?

Hardware accelerators have been an essential feature of microprocessors for decades, providing performance for features that the processor is unable to execute efficiently itself. Many times, this circuitry has been dedicated to performing floating point calculations or complex mathematics to bridge a performance gap of the processor’s instruction set. The advantage they often bring is determinism to calculations that, without them, would complete in varying time periods. In the world of control systems, such as motor control, this reliable determinism is highly beneficial.
Brushless DC motors (BLDC) have changed the motor control landscape significantly, allowing smaller, lighter, and more efficient motors to be integrated into applications where brushed DC motors simply were not viable. Control solutions for such motors can be very simple, relying on a commutation circuit that consists of little more than a Hall sensor and a switch. However, for advanced and efficient operation, a microcontroller is required.
Microcontroller-based commutation requires that rotor position is correctly determined, often through measurement of motor phase voltages and currents. This needs to occur several times per electrical revolution, and significantly more per mechanical revolution, to guarantee smooth operation. This demands that the microcontroller can complete the necessary mathematical calculations based upon incoming sensor data prior to the next commutation point. As rotation speed of the motor increases, the window for completion of these calculations narrows. If the calculations are non-deterministic, it can be very difficult to develop an optimal solution that reliably supports high rotational speeds.
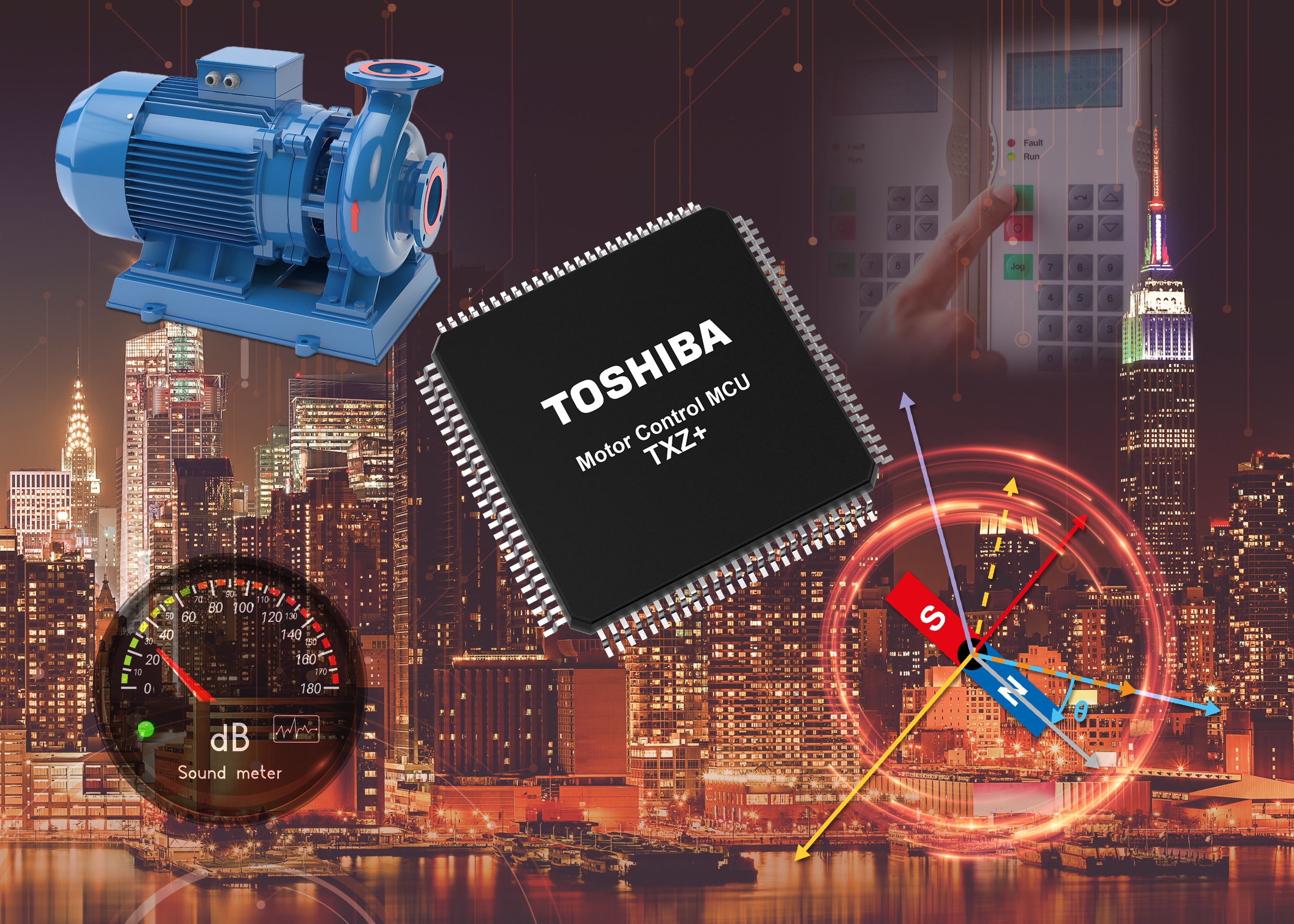
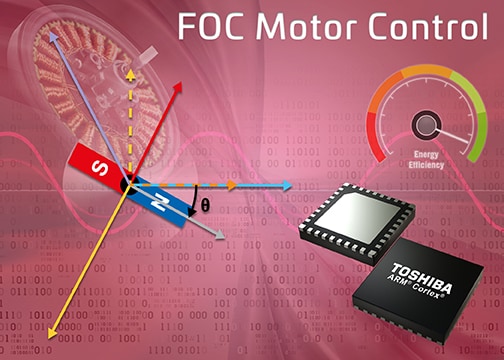
Vector or field-oriented control (FOC), first proposed back in the 1960s, relies upon a series of mathematical equations, known as Clarke and Park transformations, that challenge the instruction set of most processors. To combat this, Toshiba has developed a hardware accelerator that embeds the necessary 2 to 3 and 3 to 2 phase conversions, space vector modulation, and rotating coordinate conversions required.
This module, known as an Advanced Vector Engine (A-VE), is tightly integrated alongside an analog-to-digital converter (ADC) and a pulse-width modulation (PWM) block to provide a highly deterministic, relatively autonomous FOC solution. It is embedded alongside an Arm® Cortex®-M4, 32-bit processor, 512kB of flash memory and 32kB of SRAM as part of a microcontroller solution. In total, the M4K group of products from the TXZ4 series of microcontrollers can control up to three motors simultaneously. Motors can be supported at rotational speeds of up to 250,000 rpm with sensorless FOC.
To find out more about the technology behind the Advanced Vector Engine and how the TXZ4 series of microcontroller can be used to implement FOC motor control, take a look at our white paper available here: