- General Top
- SEMICONDUCTOR
- STORAGE
- COMPANY
-
My ToshibaSemicon
- Semiconductor Top
-
ApplicationsAutomotive
Body Electronics
xEV
In-Vehicle Infotainment
Advanced Driver-Assistance Systems (ADAS)
Chassis
IndustrialInfrastructure
BEMS/HEMS
Factory Automation
Commercial Equipment
Consumer/PersonalIoT Equipment
Healthcare
Wearable Device
Mobile
Computer Peripherals
-
ProductsAutomotive Devices
Discrete Semiconductor
Diodes
Transistors
Logic ICs
Analog Devices
- Automotive SmartMCD™ (Integreted SoC Conbining Microcontroller and Driver)
- Automotive Brushless Motor Driver ICs
- Automotive Brushed DC Motor Driver ICs
- Automotive Stepping Motor Driver ICs
- Automotive Driver ICs
- Automotive System Power Supplies ICs
- Automotive audio power amplifier ICs
- Automotive Network Communication
Digital Devices
Wireless Devices
※
 : Products list (parametric search)Power Semiconductors
: Products list (parametric search)Power SemiconductorsSiC Power Devices
※
: Products list (parametric search)Isolators/Solid State RelaysPhotocouplers
Digital Isolators
Solid State Relays
Fiber Optic Transmitting Modules
※
: Products list (parametric search)MOSFETsIGBTs/IEGTsBipolar Transistors※
: Products list (parametric search)Diodes※
: Products list (parametric search)MicrocontrollersMotor Driver ICsIntelligent Power ICs※
: Products list (parametric search)Power Management ICsLinear ICs※
: Products list (parametric search)General Purpose Logic ICsLinear Image SensorsOther Product ICsOther Product ICs
※
: Products list (parametric search) -
Design & Development
Design & Development
Innovation Centre
At the Toshiba Innovation Centre we constantly strive to inspire you with our technologies and solutions. Discover how to place us at the heart of your innovations.
-
Knowledge
Knowledge
Highlighted Topics
Further Materials
Other
- Where To Buy



- Part Number & Keyword Search
- Cross Reference Search
- Parametric Search
- Stock Check & Purchase
This webpage doesn't work with Internet Explorer. Please use the latest version of Google Chrome, Microsoft Edge, Mozilla Firefox or Safari.
require 3 characters or more. Search for multiple part numbers fromhere.
The information presented in this cross reference is based on TOSHIBA's selection criteria and should be treated as a suggestion only. Please carefully review the latest versions of all relevant information on the TOSHIBA products, including without limitation data sheets and validate all operating parameters of the TOSHIBA products to ensure that the suggested TOSHIBA products are truly compatible with your design and application.Please note that this cross reference is based on TOSHIBA's estimate of compatibility with other manufacturers' products, based on other manufacturers' published data, at the time the data was collected.TOSHIBA is not responsible for any incorrect or incomplete information. Information is subject to change at any time without notice.
require 3 characters or more.
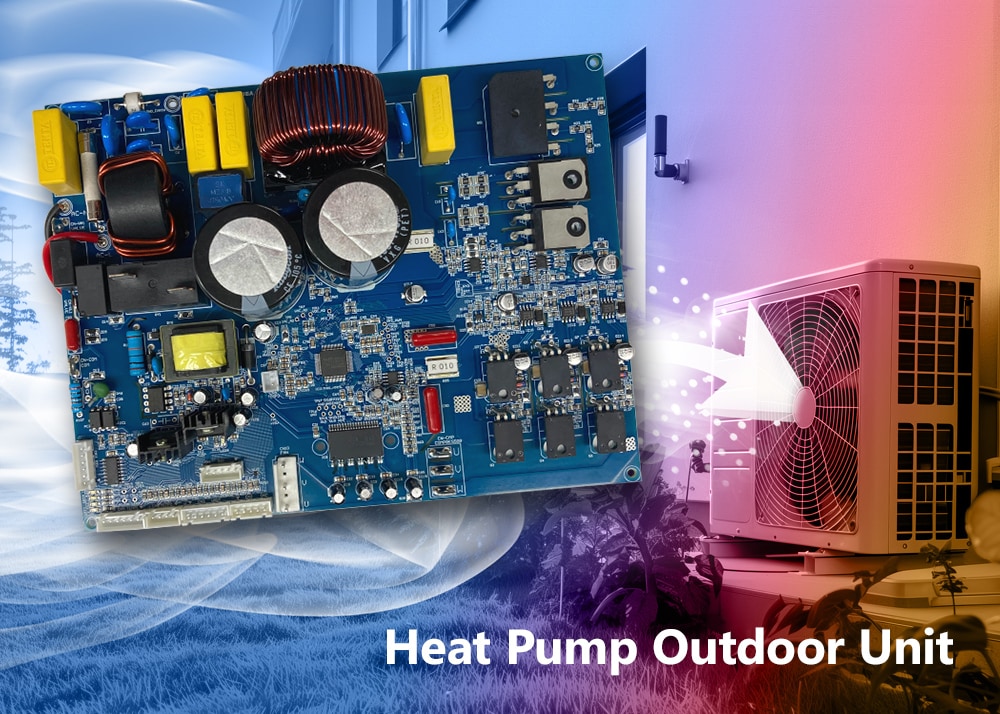
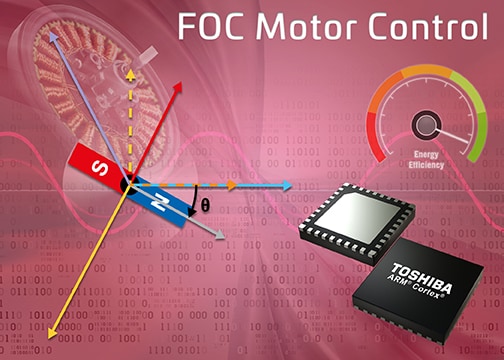
The Ongoing Progression of FOC Motor Control
Systems driven by some form of electric motor represent the biggest single consumer of electricity resources. The International Energy Agency (IEA) estimates that a staggering proportion - over 40% - of the world’s total electricity usage comes from such systems. Therefore, any methodology that can help to maximize electric motors’ operational efficiencies clearly has a great deal of value.
Thanks to the electronic commutation of brushless DC (BLDC) motors it has been possible to improve their efficiency levels. Sensor-less motor control, as an alternative to sensor-based arrangements, has become increasingly popular - since it has several key advantages associated with it. At the foundation of these advantages is the fact that such systems do not call for the inclusion of Hall sensors (which can potentially have size, cost and reliability issues). Instead they rely on measuring the back EMF induced within the stator windings by the rotor’s permanent magnets. As well as having significantly lower bill of materials costs, sensor-less motor control arrangements also have more compact form factors - making them appealing in situations where there are space constraints that need to be factored in, or where there are concerns about the overall expense.
Through numerous engineering innovations relating to the techniques used in sensor-less motor control, it has been possible to make iterative enhancements to the whole process. This has led to more precise calculation of the rotor position - which has, in turn resulted in a reduction in energy losses.
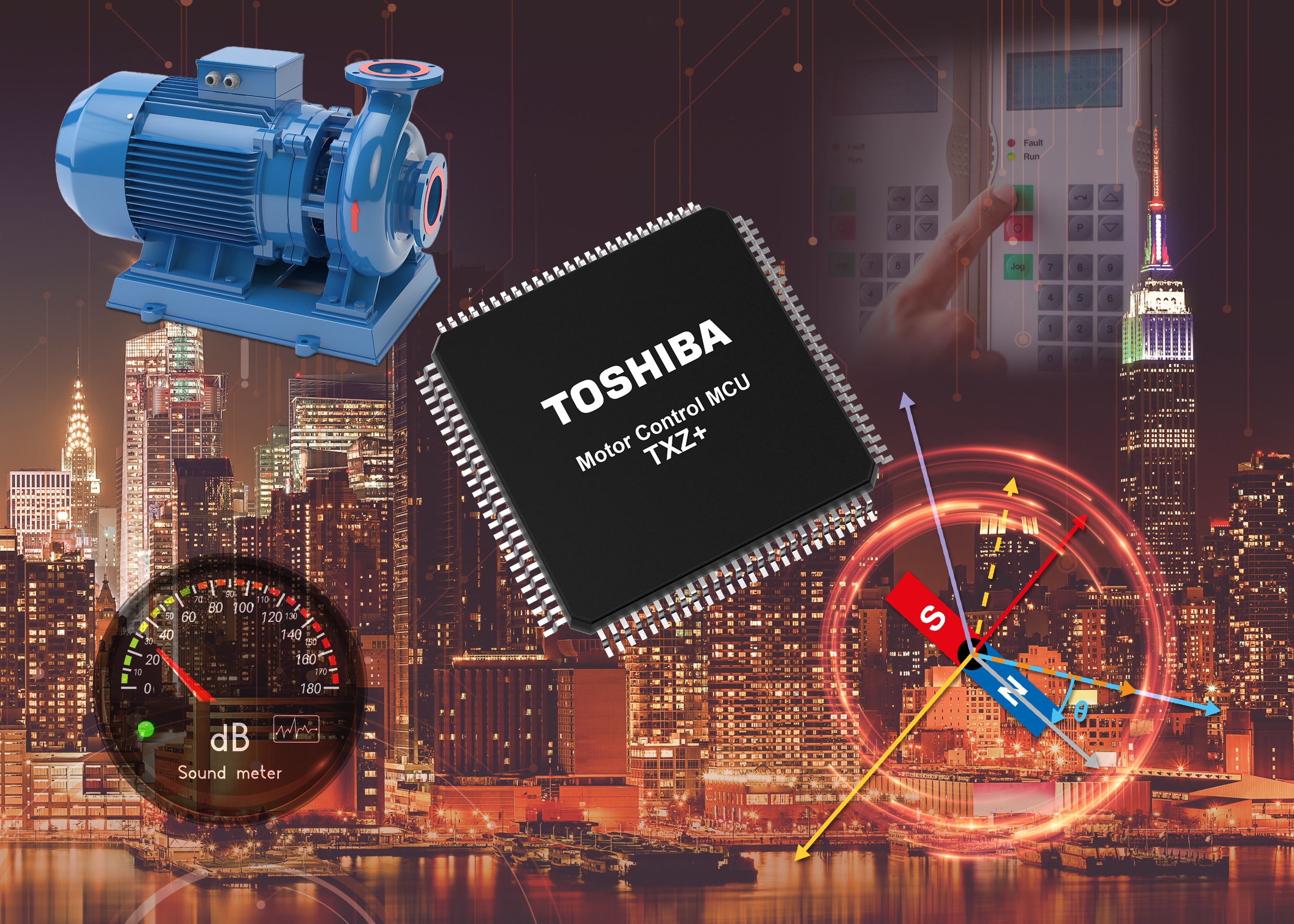
Field oriented control (FOC), sometimes referred to as vector control, has proved highly effective at delivering smooth and efficient motor function. It does, however, struggle under certain circumstances. At low speeds, this sensor-less motor control technique calls for the application of a high-frequency test signal to the system in order to accurately determine the position of the rotor. Though this can give very exact results, it comes with drawbacks too. The high-frequency signals will cause torque ripple that will thereby impact on the smooth running of the motor. There will be energy losses, along with electro-magnetic and acoustic noise being generated.
The M4K microcontroller devices from Toshiba are enabling marked improvements to the way in which BLDC motors are controlled. Pivotal to this is their use of the company’s proprietary Advanced Vector Engine Plus IP (A-VE+) and Advanced Programmable Motor Driver (A-PMD) technologies. A-VE+ deals with the mathematical calculations that FOC requires, while A-PMD means that individual pulse-width modulated (PWM) carriers can be assigned to each motor phase. A-PMD avoids the far from ideal practice of applying high-frequency test signals to the control system in situations where the motor is running at lower speeds. Consequently, the presence of unwanted vibrations and noise can be eliminated, with smoother, more efficient low speed operation being benefited from.
You can read Toshiba’s informative whitepaper on FOC motor control below: