- General Top
- SEMICONDUCTOR
- STORAGE
- COMPANY
-
My ToshibaSemicon
- Semiconductor Top
-
ApplicationsAutomotive
Body Electronics
xEV
In-Vehicle Infotainment
Advanced Driver-Assistance Systems (ADAS)
Chassis
IndustrialInfrastructure
BEMS/HEMS
Factory Automation
Commercial Equipment
Consumer/PersonalIoT Equipment
Healthcare
Wearable Device
Mobile
Computer Peripherals
-
ProductsAutomotive Devices
Discrete Semiconductor
Diodes
Transistors
Logic ICs
Analog Devices
- Automotive SmartMCD™ (Integreted SoC Conbining Microcontroller and Driver)
- Automotive Brushless Motor Driver ICs
- Automotive Brushed DC Motor Driver ICs
- Automotive Stepping Motor Driver ICs
- Automotive Driver ICs
- Automotive System Power Supplies ICs
- Automotive audio power amplifier ICs
- Automotive Network Communication
Digital Devices
Wireless Devices
※
 : Products list (parametric search)Power Semiconductors
: Products list (parametric search)Power SemiconductorsSiC Power Devices
※
: Products list (parametric search)Isolators/Solid State RelaysPhotocouplers
Digital Isolators
Solid State Relays
Fiber Optic Transmitting Modules
※
: Products list (parametric search)MOSFETsIGBTs/IEGTsBipolar Transistors※
: Products list (parametric search)Diodes※
: Products list (parametric search)MicrocontrollersMotor Driver ICsIntelligent Power ICs※
: Products list (parametric search)Power Management ICsLinear ICs※
: Products list (parametric search)General Purpose Logic ICsLinear Image SensorsOther Product ICsOther Product ICs
※
: Products list (parametric search) -
Design & Development
Design & Development
Innovation Centre
At the Toshiba Innovation Centre we constantly strive to inspire you with our technologies and solutions. Discover how to place us at the heart of your innovations.
-
Knowledge
Knowledge
Highlighted Topics
Further Materials
Other
- Where To Buy



- Part Number & Keyword Search
- Cross Reference Search
- Parametric Search
- Stock Check & Purchase
This webpage doesn't work with Internet Explorer. Please use the latest version of Google Chrome, Microsoft Edge, Mozilla Firefox or Safari.
require 3 characters or more. Search for multiple part numbers fromhere.
The information presented in this cross reference is based on TOSHIBA's selection criteria and should be treated as a suggestion only. Please carefully review the latest versions of all relevant information on the TOSHIBA products, including without limitation data sheets and validate all operating parameters of the TOSHIBA products to ensure that the suggested TOSHIBA products are truly compatible with your design and application.Please note that this cross reference is based on TOSHIBA's estimate of compatibility with other manufacturers' products, based on other manufacturers' published data, at the time the data was collected.TOSHIBA is not responsible for any incorrect or incomplete information. Information is subject to change at any time without notice.
require 3 characters or more.
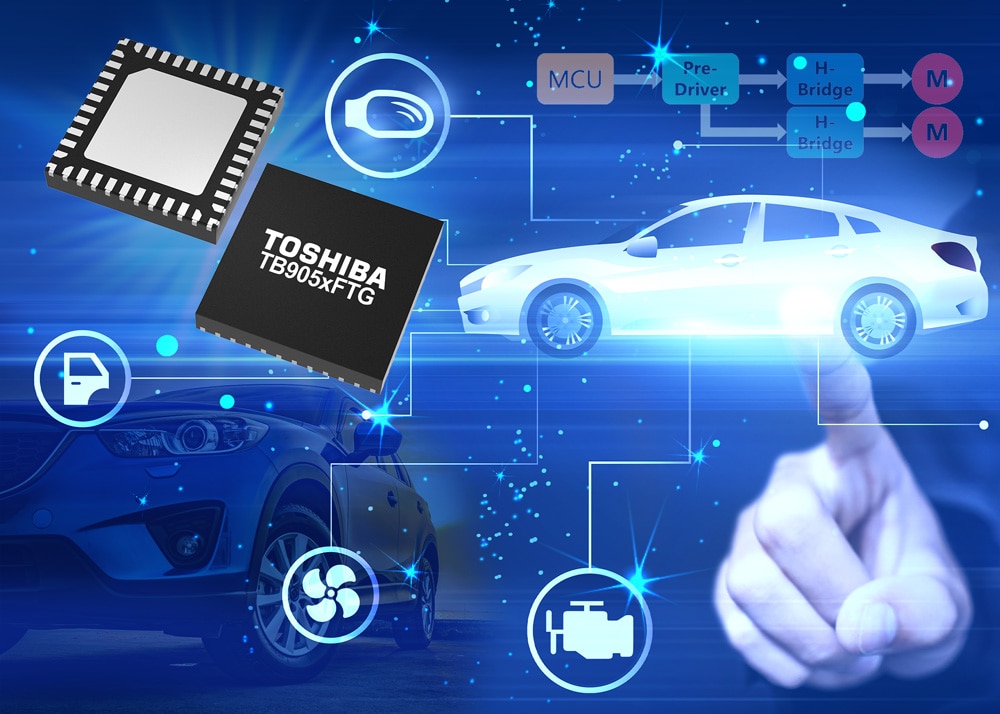
Enhanced field-oriented control for automotive
Brushless DC (BLDC) motors are increasingly used in vehicles for fans, pumps, powered doors and more as they are energy efficient with a better power/size ratio. Getting a BLDC motor to move is easy, but optimising operation is far more challenging, especially as they normally require position sensors that can be unreliable and bulky.
Methods such as measuring the electromotive force (EMF) can work, but there are limitations, especially at slow speeds.
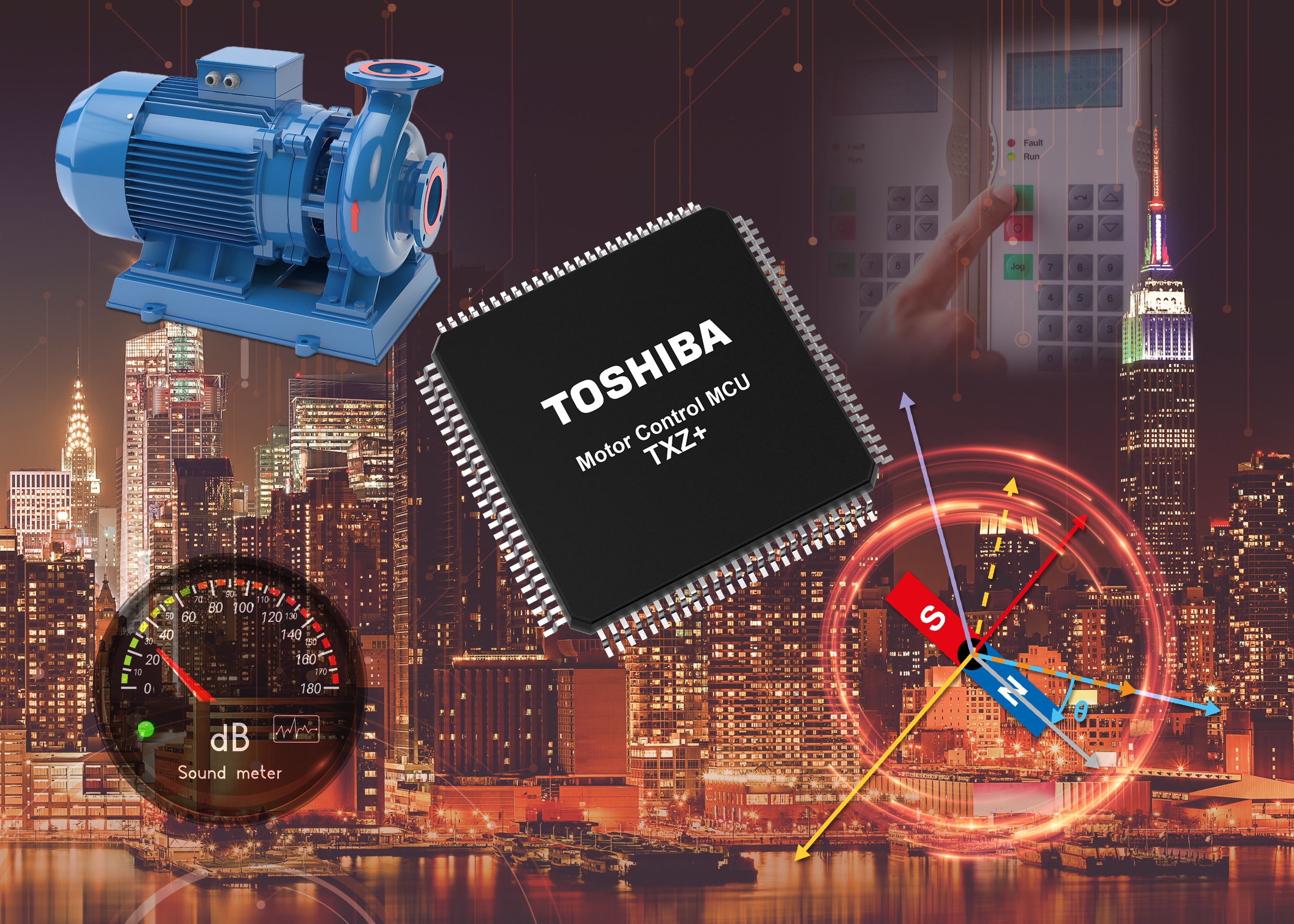
Field-Oriented Control (FOC), sometimes known as vector control, is a means of overcoming these issues through the use of sinusoidal control signals, phase-shifted by 120° that generate a rotating magnetic field to propel the motor at a constant torque, aligning with the desired rotational speed of the motor.
However, controlling the three-phase sinusoidal currents with a proportional-integral (PI) regulator in a typical microcontroller (MCU) is challenging as it requires complex algorithms and transformations.
Position sensing is essential, and Hall sensors are commonly used to balance accuracy and cost, although some applications demand the accuracy of incremental encoders.
To eliminate the bulk of these sensors FOC can operate without them, using the principle that the magnetic flux from the permanent magnets on the rotor induces a current in the stator coils. Using a simple shunt resistor, this current can be measured via an analog-to-digital converter (ADC).
However, implementing FOC is not trivial as it requires ADCs and a powerful MCU that can handle the Park and Clarke (forward and reverse) transformations, software that can implement proportional and integral (PI) control, and pulse width modulation (PWM) with sufficient resolution.
Even in relatively powerful MCUs, all of this processing will occupy a very significant proportion of the processing capacity – potentially slowing or interrupting other important functions of the MCU.
For this reason, as system performance demands increase and system form factors are forced to shrink, many designers are finding a dedicated FOC motor controller to be the preferred option. Often known as a vector engine, these devices take care of the current control, complex transformations, rotation angle estimation and three-phase motor current system.
When a vector engine is used, a smaller MCU can be used, safe in the knowledge that motor control tasks will not impede normal operation.
Read the full Toshiba Whitepaper with more details of FOC advantages in automotive motor control designs.