- General Top
- SEMICONDUCTOR
- STORAGE
- COMPANY
-
My ToshibaSemicon
- Semiconductor Top
-
ApplicationsAutomotive
Body Electronics
xEV
In-Vehicle Infotainment
Advanced Driver-Assistance Systems (ADAS)
Chassis
IndustrialInfrastructure
BEMS/HEMS
Factory Automation
Commercial Equipment
Consumer/PersonalIoT Equipment
Healthcare
Wearable Device
Mobile
Computer Peripherals
-
ProductsAutomotive Devices
Discrete Semiconductor
Diodes
Transistors
Logic ICs
Analog Devices
- Automotive SmartMCD™ (Integreted SoC Conbining Microcontroller and Driver)
- Automotive Brushless Motor Driver ICs
- Automotive Brushed DC Motor Driver ICs
- Automotive Stepping Motor Driver ICs
- Automotive Driver ICs
- Automotive System Power Supplies ICs
- Automotive audio power amplifier ICs
- Automotive Network Communication
Digital Devices
Wireless Devices
※
 : Products list (parametric search)Power Semiconductors
: Products list (parametric search)Power SemiconductorsSiC Power Devices
※
: Products list (parametric search)Isolators/Solid State RelaysPhotocouplers
Digital Isolators
Solid State Relays
Fiber Optic Transmitting Modules
※
: Products list (parametric search)MOSFETsIGBTs/IEGTsBipolar Transistors※
: Products list (parametric search)Diodes※
: Products list (parametric search)MicrocontrollersMotor Driver ICsIntelligent Power ICs※
: Products list (parametric search)Power Management ICsLinear ICs※
: Products list (parametric search)General Purpose Logic ICsLinear Image SensorsOther Product ICsOther Product ICs
※
: Products list (parametric search) -
Design & Development
Design & Development
Innovation Centre
At the Toshiba Innovation Centre we constantly strive to inspire you with our technologies and solutions. Discover how to place us at the heart of your innovations.
-
Knowledge
Knowledge
Highlighted Topics
Further Materials
Other
- Where To Buy



- Part Number & Keyword Search
- Cross Reference Search
- Parametric Search
- Stock Check & Purchase
This webpage doesn't work with Internet Explorer. Please use the latest version of Google Chrome, Microsoft Edge, Mozilla Firefox or Safari.
require 3 characters or more. Search for multiple part numbers fromhere.
The information presented in this cross reference is based on TOSHIBA's selection criteria and should be treated as a suggestion only. Please carefully review the latest versions of all relevant information on the TOSHIBA products, including without limitation data sheets and validate all operating parameters of the TOSHIBA products to ensure that the suggested TOSHIBA products are truly compatible with your design and application.Please note that this cross reference is based on TOSHIBA's estimate of compatibility with other manufacturers' products, based on other manufacturers' published data, at the time the data was collected.TOSHIBA is not responsible for any incorrect or incomplete information. Information is subject to change at any time without notice.
require 3 characters or more.
Starting a sensorless BLDC motor

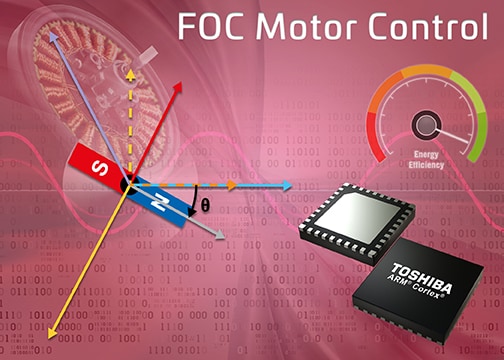
Access to highly integrated MCU-less motor control solutions allows that permanent magnet synchronous motor (PMSM) operation can be achieved without requiring rotor sensors.
With a mechanically commutated brushed DC motor the commutation point is physically defined, meaning that simple reapplication of power will ensure the right coils are engaged to start the motor correctly. However, in sensorless BLDC operation, novel techniques are needed to determine the stationary rotor’s angle before energising the coils to ensure the rotor does not suddenly move in the wrong direction.
Toshiba’s TC78B011FTG sine wave pre-driver IC for sensorless three-phase brushless motor control negates the need for MCU use. It is very straightforward to configure, requiring just a few simple steps. After power is applied, the TC78B011FTG retrieves the stored configuration from NVM. A brake sequence, (generated by shorting the appropriate coils) guarantees that the rotor is stationary before attempting to start rotation. Once this is complete, the driver enters an idle state and awaits the next command.
When the speed control command is received, either via I2C or as a PWM or analogue signal applied to the SPD pin, the motor start-up sequence is engaged. There is DC excitation of the motor coils to determine the starting position of the rotor and then, forced commutation of the motor starts. Here, a rough electrical field is applied in 120° commutation to generate an initial back-EMF. A configurable soft start feature is also included, limiting the current drawn when spinning up the motor. All speed control at this stage is open loop.
Once the motor rotates fast enough to generate a back-EMF usable for the control algorithm, the TC78B011FTG switches to sensorless control with the current limit set for normal operation. If selected, closed-loop speed control is also engaged at this point.
Should the rotor already be rotating (known as idling or windmilling), due to an external mechanical force such as air passing over a fan’s blades, the motor driver will skip the initial excitation and forced commutation steps and proceed directly with sensorless operation. However, there are challenges with this approach so, to avoid this the motor controller can be configured to apply its braking sequence after leaving standby or power on, enabling the rotor to always start from a stopped state.
Toshiba has created a white paper specifically on MCU-less BLDC control. You can download your copy here: