- General Top
- SEMICONDUCTOR
- STORAGE
- COMPANY
-
My ToshibaSemicon
- Semiconductor Top
-
ApplicationsAutomotive
Body Electronics
xEV
In-Vehicle Infotainment
Advanced Driver-Assistance Systems (ADAS)
Chassis
IndustrialInfrastructure
BEMS/HEMS
Factory Automation
Commercial Equipment
Consumer/PersonalIoT Equipment
Healthcare
Wearable Device
Mobile
Computer Peripherals
-
ProductsAutomotive Devices
Discrete Semiconductor
Diodes
Transistors
Logic ICs
Analog Devices
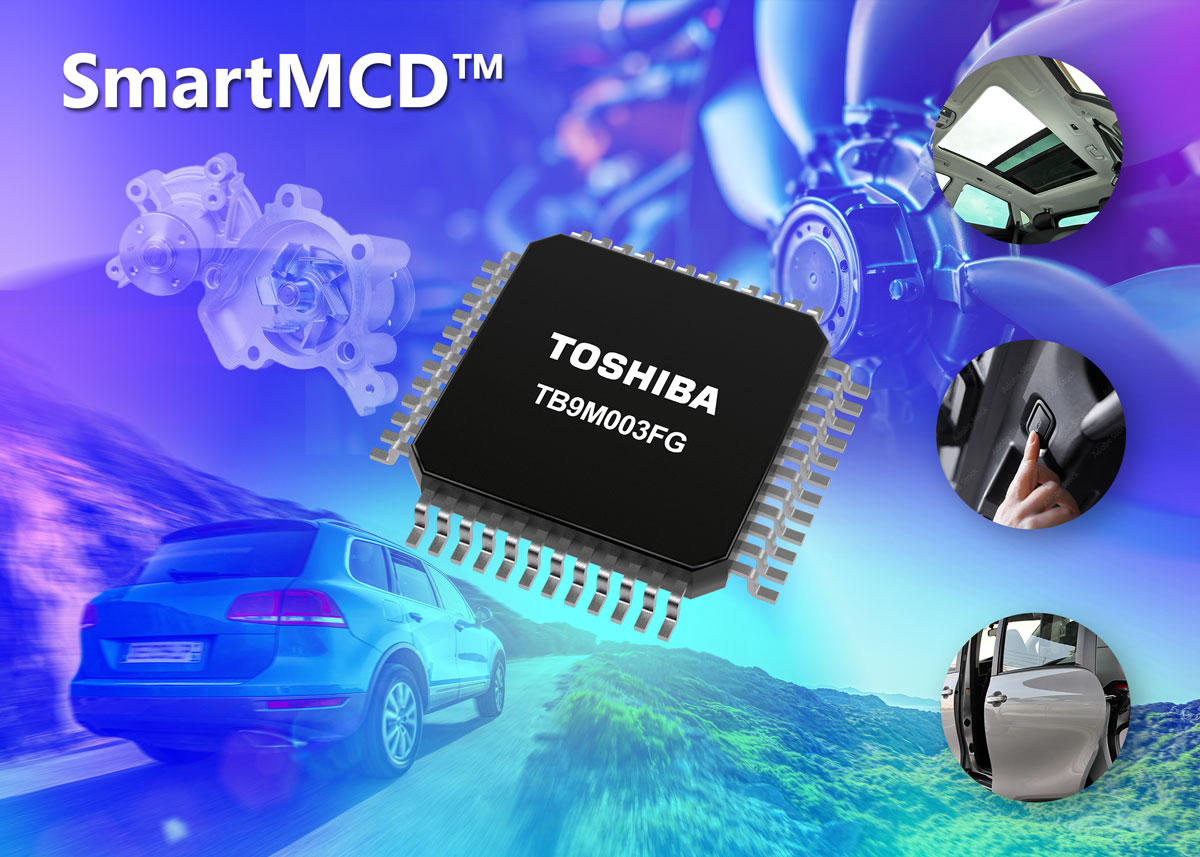
- Automotive SmartMCD™ (Integreted SoC Conbining Microcontroller and Driver)
- Automotive Brushless Motor Driver ICs
- Automotive Brushed DC Motor Driver ICs
- Automotive Stepping Motor Driver ICs
- Automotive Driver ICs
- Automotive System Power Supplies ICs
- Automotive audio power amplifier ICs
- Automotive Network Communication
Digital Devices
Wireless Devices
※
 : Products list (parametric search)Power Semiconductors
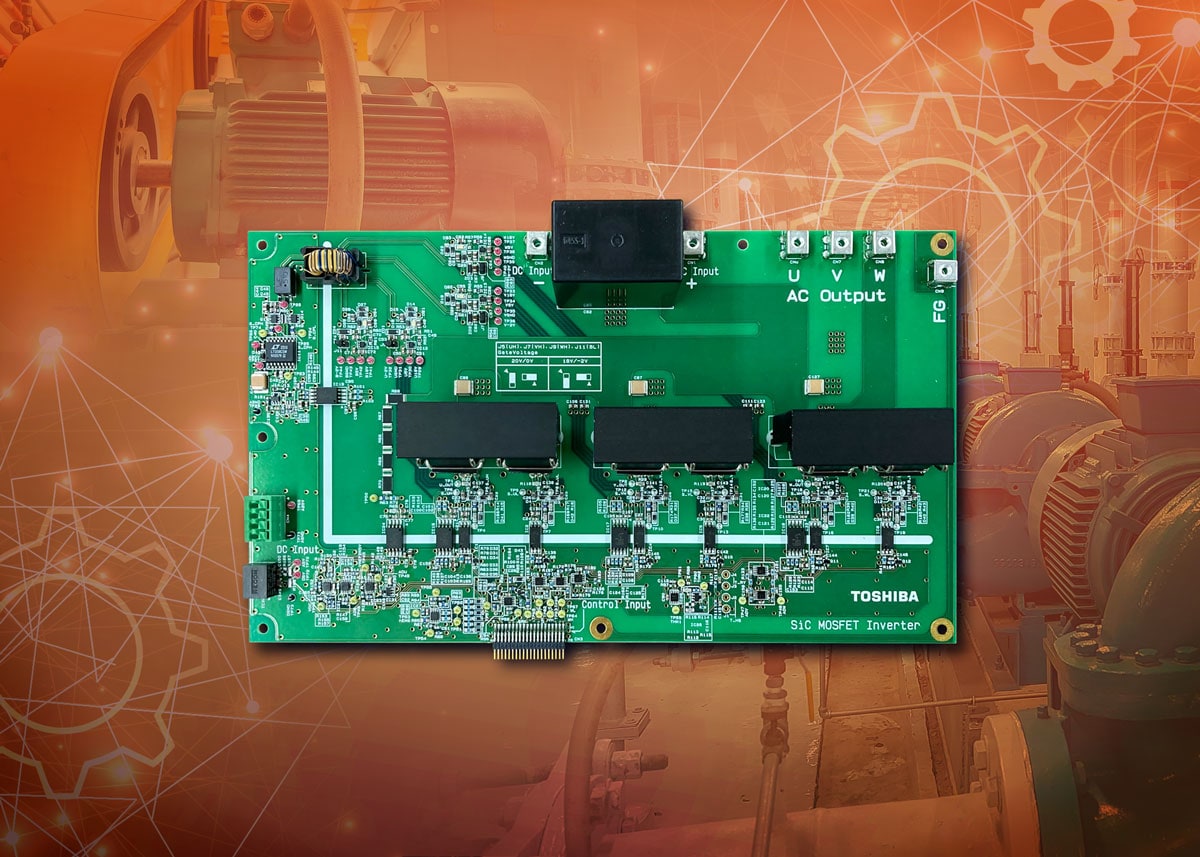
: Products list (parametric search)Power SemiconductorsSiC Power Devices
※
: Products list (parametric search)Isolators/Solid State RelaysPhotocouplers
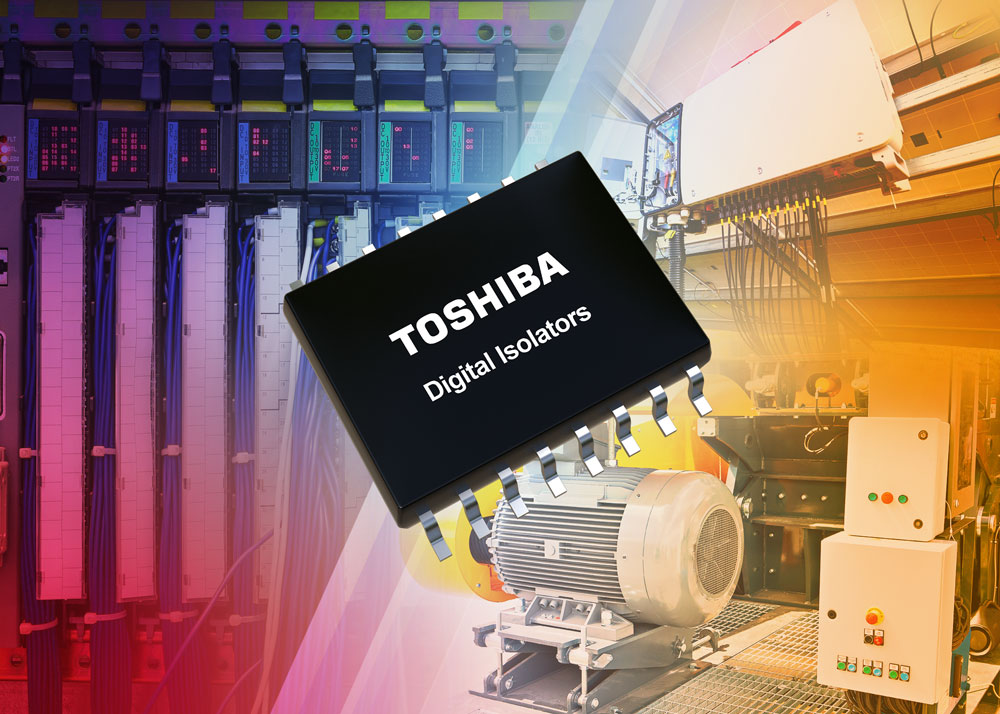
Digital Isolators
Solid State Relays
Fiber Optic Transmitting Modules
※
: Products list (parametric search)MOSFETsIGBTs/IEGTsBipolar Transistors※
: Products list (parametric search)Diodes※
: Products list (parametric search)MicrocontrollersMotor Driver ICsIntelligent Power ICs※
: Products list (parametric search)Power Management ICsLinear ICs※
: Products list (parametric search)General Purpose Logic ICsLinear Image SensorsOther Product ICsOther Product ICs
※
: Products list (parametric search) -
Design & Development
Design & Development
Innovation Centre
At the Toshiba Innovation Centre we constantly strive to inspire you with our technologies and solutions. Discover how to place us at the heart of your innovations.
-
Knowledge
Knowledge
Highlighted Topics
Further Materials
Other
- Where To Buy



- Part Number & Keyword Search
- Cross Reference Search
- Parametric Search
- Stock Check & Purchase
This webpage doesn't work with Internet Explorer. Please use the latest version of Google Chrome, Microsoft Edge, Mozilla Firefox or Safari.
require 3 characters or more. Search for multiple part numbers fromhere.
The information presented in this cross reference is based on TOSHIBA's selection criteria and should be treated as a suggestion only. Please carefully review the latest versions of all relevant information on the TOSHIBA products, including without limitation data sheets and validate all operating parameters of the TOSHIBA products to ensure that the suggested TOSHIBA products are truly compatible with your design and application.Please note that this cross reference is based on TOSHIBA's estimate of compatibility with other manufacturers' products, based on other manufacturers' published data, at the time the data was collected.TOSHIBA is not responsible for any incorrect or incomplete information. Information is subject to change at any time without notice.
require 3 characters or more.
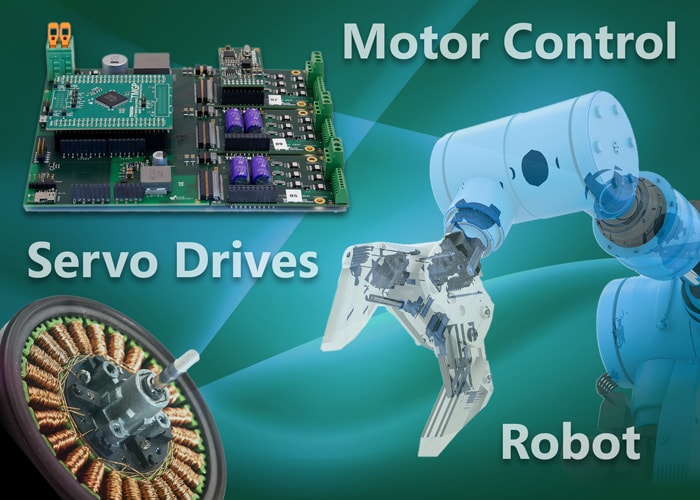
Implementing Advanced Servo Operation in Robotic Designs

Greater reliance on robots seems to be a certainty in the years ahead. Though this has been prophesied in sci-fi films and literature for decades, and admittedly never really happened, the dynamics that were previously not strong enough are now becoming increasingly compelling. Firstly, we have an aging population here in the West, and not enough care staff to look after them. Also, we now have greater concerns about safety. There are various places where use of autonomous guided vehicles (AGVs) will mean that human operatives no longer have to be put in danger (when it comes to materials handling, repair work, exploration, etc.). Use of robots in an industrial context will, of course, help to drive up productivity levels and remove the impact of human errors on output quality. The fear in the past was that this would lead to jobs being lost. Now it is clear that, rather than replacing jobs, workers will be able to offload their more menial tasks and focus on activities where they can have greater value.
With robots starting to interact more closely with humans - whether it is in a care home, in a public service environment, or on the factory floor - the need to ensure that their movements are not clumsy or erratic will be a priority. Servo motors are a key element of any robotic design, since it is through these that a robot is able to move or orientate itself correctly. If they are to operate effectively, then then appropriate motor control technology will need to be implemented. The degree of accuracy with which control for each individual axis of a robot’s often complex movement is achieved will be dependent on how precisely the position of the relevant BLDC’s rotor can be determined. That can prove a difficult proposition for engineers, especially those who have little prior experience in this area.
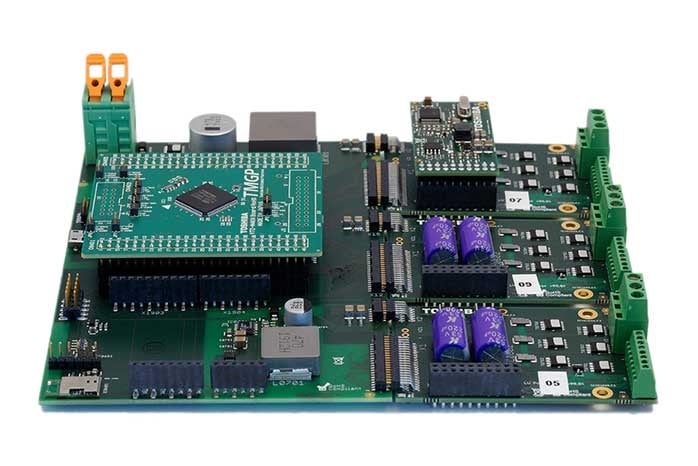
With the intention of facilitating motion control implementation within robotic systems, Toshiba has introduced a multi-faceted servo drive reference model. This provides engineers with a convenient and easy to configure platform upon which they can construct applicable motor control systems. Central to this hardware is the company’s Arm-based M4K MCU.
As the reference model is able to drive up to three BLDC motors via a single MCU, there is potential for significant reductions in component count and overall system cost to be realised. Also, its modular construction means that there is greater scope for engineers from a design perspective. Different power delivery and encoder options can be utilised, in line with the particular application requirements.
You can access a whitepaper that looks at the incorporation of servo drives into robotic systems below: