- General Top
- SEMICONDUCTOR
- STORAGE
- COMPANY
-
My ToshibaSemicon
- Semiconductor Top
-
ApplicationsAutomotive
Body Electronics
xEV
In-Vehicle Infotainment
Advanced Driver-Assistance Systems (ADAS)
Chassis
IndustrialInfrastructure
BEMS/HEMS
Factory Automation
Commercial Equipment
Consumer/PersonalIoT Equipment
Healthcare
Wearable Device
Mobile
Computer Peripherals
-
ProductsAutomotive Devices
Discrete Semiconductor
Diodes
Transistors
Logic ICs
Analog Devices
- Automotive SmartMCD™ (Integreted SoC Conbining Microcontroller and Driver)
- Automotive Brushless Motor Driver ICs
- Automotive Brushed DC Motor Driver ICs
- Automotive Stepping Motor Driver ICs
- Automotive Driver ICs
- Automotive System Power Supplies ICs
- Automotive audio power amplifier ICs
- Automotive Network Communication
Digital Devices
Wireless Devices
※
 : Products list (parametric search)Power Semiconductors
: Products list (parametric search)Power SemiconductorsSiC Power Devices
※
: Products list (parametric search)Isolators/Solid State RelaysPhotocouplers
Digital Isolators
Solid State Relays
Fiber Optic Transmitting Modules
※
: Products list (parametric search)MOSFETsIGBTs/IEGTsBipolar Transistors※
: Products list (parametric search)Diodes※
: Products list (parametric search)MicrocontrollersMotor Driver ICsIntelligent Power ICs※
: Products list (parametric search)Power Management ICsLinear ICs※
: Products list (parametric search)General Purpose Logic ICsLinear Image SensorsOther Product ICsOther Product ICs
※
: Products list (parametric search) -
Design & Development
Design & Development
Innovation Centre
At the Toshiba Innovation Centre we constantly strive to inspire you with our technologies and solutions. Discover how to place us at the heart of your innovations.
-
Knowledge
Knowledge
Highlighted Topics
Further Materials
Other
- Where To Buy



- Part Number & Keyword Search
- Cross Reference Search
- Parametric Search
- Stock Check & Purchase
This webpage doesn't work with Internet Explorer. Please use the latest version of Google Chrome, Microsoft Edge, Mozilla Firefox or Safari.
require 3 characters or more. Search for multiple part numbers fromhere.
The information presented in this cross reference is based on TOSHIBA's selection criteria and should be treated as a suggestion only. Please carefully review the latest versions of all relevant information on the TOSHIBA products, including without limitation data sheets and validate all operating parameters of the TOSHIBA products to ensure that the suggested TOSHIBA products are truly compatible with your design and application.Please note that this cross reference is based on TOSHIBA's estimate of compatibility with other manufacturers' products, based on other manufacturers' published data, at the time the data was collected.TOSHIBA is not responsible for any incorrect or incomplete information. Information is subject to change at any time without notice.
require 3 characters or more.
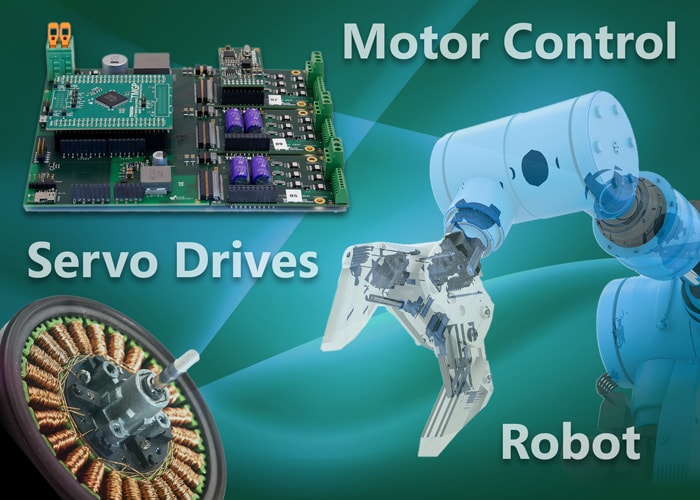
Applying a Better Approach to Servo Drive Implementation in Next Generation Robotic Systems

Servos are what enable robot movement to be initiated - with six of them usually incorporated into modern robot arms, and even more being needed for mobile AGV units and suchlike. The use of BLDCs to drive the servos in robotic designs offers a lot of advantages over brushed motors. These include greater operational efficiency, longer operational lifespan and reduced noise. They do, however, require more sophisticated control. Accurate rotor positioning data in relation to each individual motor in the robotic system will be essential.
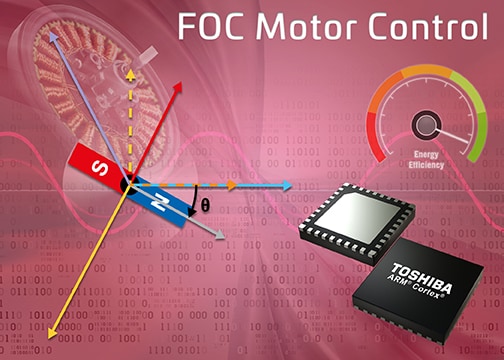
The control of these BLDCs can be broken down into three key elements. These are the controller (optimized for Field-Oriented-Control using appropriate switching technology to maximise operational efficiency, so that energy reserves are not wasted), the power delivery ( with very low power losses leading to reduced heat generation), and the feedback loop (with data on the exact position of the rotor being continuously updated). The amount of time and effort involved in all this can be daunting for most engineers, and this is why being able to address everything using an optimised development platform would be hugely beneficial.
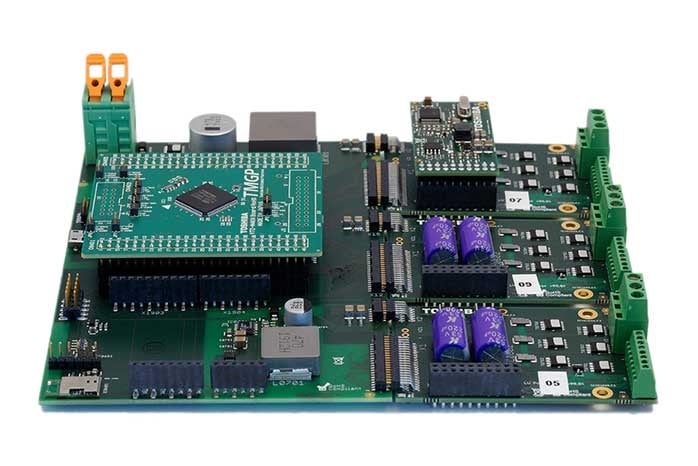
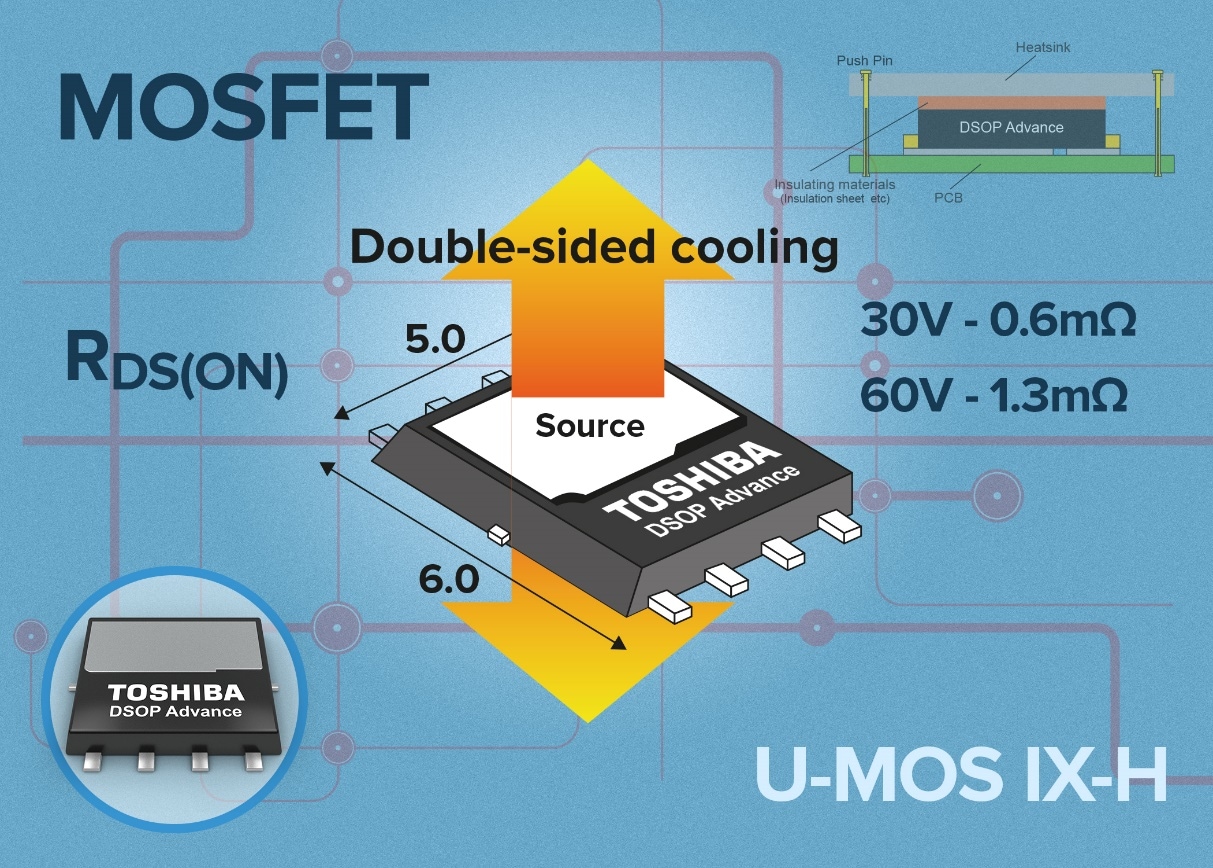
In order to assist engineers looking to develop motor systems for robotic use cases, so that they can get a useful head start there, the Toshiba Servo Drive Reference Model has been developed. The MCU employed in this hardware leverages an Arm® Cortex®-M4 processing core which is capable of running at speeds of up to 160MHz, with a floating point unit (FPU) plus 512kB of Flash memory resource. The MCU’s Vector Engine is able to undertake all the necessary vector control calculations. The control element is complemented by a power delivery element, which comprises six 100V-rated MOSFETs. These MOSFETS are based on Toshiba’s latest generation U-MOS IX-H trench process. This process mitigates some of the power losses normally experienced, by being able to provide a better trade-off between charge characteristics and on-resistance.
Details on this reference model can be found in a whitepaper that Toshiba has published on robotic servo drives. This can be downloaded below: