
-
My ToshibaSemicon
- セミコンダクタートップ
-
アプリケーション車載
ボディエレクトロニクス
xEV
インフォテインメント
産業用機器業務用機器
民生/個人用機器 -
製品車載用デバイス
ディスクリート半導体
ダイオード
トランジスター
汎用ロジックIC
アナログデバイス
※
 : 製品一覧(パラメトリックサーチ)パワー半導体
: 製品一覧(パラメトリックサーチ)パワー半導体※
: 製品一覧(パラメトリックサーチ)アイソレーター/ソリッドステートリレー(SSR)フォトカプラー
デジタルアイソレーター
ソリッドステートリレー (SSR)
光伝送モジュール
※
: 製品一覧(パラメトリックサーチ)MOSFETIGBT/IEGTバイポーラートランジスター※
: 製品一覧(パラメトリックサーチ)ダイオード※
: 製品一覧(パラメトリックサーチ)マイクロコントローラーモータードライバーインテリジェントパワーIC※
: 製品一覧(パラメトリックサーチ)パワーマネージメントICリニアーIC※
: 製品一覧(パラメトリックサーチ)汎用ロジックICリニアーイメージセンサーその他専用ICその他専用IC
※
: 製品一覧(パラメトリックサーチ) -
開発/設計支援
-
知る/学ぶ
- ご購入



- 品番・キーワード検索
- クロスリファレンス検索
- パラメトリック検索
- オンラインディストリビューター在庫検索
本機能は Internet Explorer 11 ではご利用頂けません。最新のGoogle Chrome, Microsoft Edge, Mozilla Firefox, Safariにてご利用ください。
品番は3文字以上指定して下さい。 複数品番の検索はこちら。
クロスリファレンスでは参考品名が表示されますので、製品に関する最新の情報をデータシート等でご確認の上、単独およびシステム全体で十分に評価し、お客様の責任において適用可否を判断してください。参考にしている情報は、取得した時点の各メーカーの公式情報に基づいた当社の推定によるものです。当社は、情報の正確性、完全性に関して一切の保証をいたしません。また、情報は予告なく変更されることがあります。
品番は3文字以上指定して下さい。
オンラインディストリビューターが保有する東芝製品の在庫照会および購入が行えるサービスです。
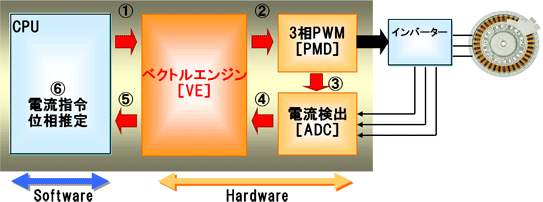
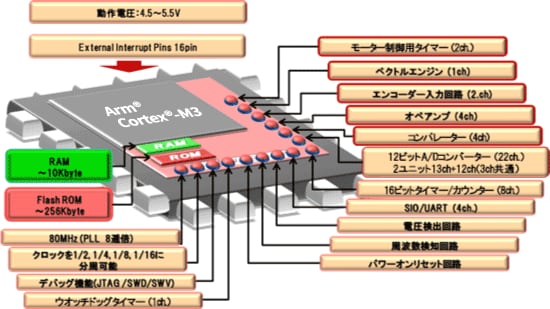
ベクトルエンジン(VE)概要紹介

モーター制御で使用する内蔵ハードウェア(ベクトルエンジン,モーター制御回路,A/Dコンバーター)はソフトウェアを介することなく連携します。
- (1) 電流指令値,位相を VEに設定(ソフトウェア処理)
- (2) 3相出力電圧,ADC変換タイミングを計算しPMDに転送(VEが自動処理)
- (3) PMDは3相PWMを出力しながら、ADCに変換開始信号を送る(PMDが自動発生)
- (4) ADCは変換動作を終了すると、終了信号をVEに送る(ADCが自動発生)
- (5) AD変換結果を取り込みフィードバック電流を計算し、CPUに割り込みを要求(VEが自動処理)
- (6) 割り込みを受けてソフトウェアで位相計算、電流指令計算を行う(ソフトウェア処理)
*ADCはADコンバーターです。
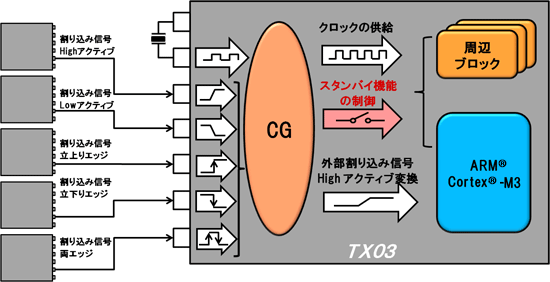
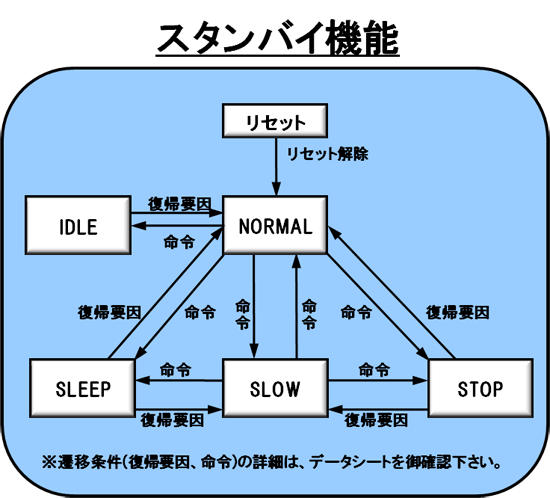
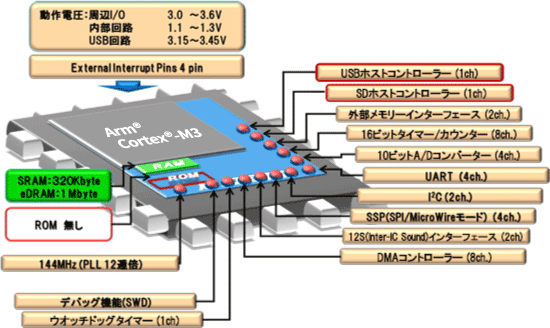
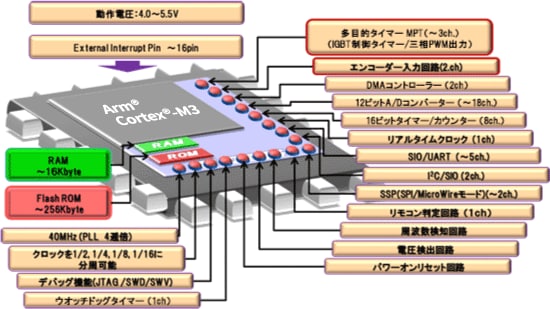
第3章 周辺回路





※ArmおよびCortexはArm Limited(またはその子会社)のUSまたはその他の国における登録商標です。