-
My ToshibaSemicon
- セミコンダクタートップ
-
アプリケーション車載
ボディエレクトロニクス
xEV
インフォテインメント
産業用機器業務用機器
民生/個人用機器 -
製品車載用デバイス
ディスクリート半導体
ダイオード
トランジスター
汎用ロジックIC
アナログデバイス
※
 : 製品一覧(パラメトリックサーチ)パワー半導体
: 製品一覧(パラメトリックサーチ)パワー半導体※
: 製品一覧(パラメトリックサーチ)アイソレーター/ソリッドステートリレー(SSR)フォトカプラー
デジタルアイソレーター
ソリッドステートリレー (SSR)
光伝送モジュール
※
: 製品一覧(パラメトリックサーチ)MOSFETIGBT/IEGTバイポーラートランジスター※
: 製品一覧(パラメトリックサーチ)ダイオード※
: 製品一覧(パラメトリックサーチ)マイクロコントローラーモータードライバーインテリジェントパワーIC※
: 製品一覧(パラメトリックサーチ)パワーマネージメントICリニアーIC※
: 製品一覧(パラメトリックサーチ)汎用ロジックICリニアーイメージセンサーその他専用ICその他専用IC
※
: 製品一覧(パラメトリックサーチ) -
開発/設計支援
-
知る/学ぶ
- ご購入



- 品番・キーワード検索
- クロスリファレンス検索
- パラメトリック検索
- オンラインディストリビューター在庫検索
本機能は Internet Explorer 11 ではご利用頂けません。最新のGoogle Chrome, Microsoft Edge, Mozilla Firefox, Safariにてご利用ください。
品番は3文字以上指定して下さい。 複数品番の検索はこちら。
クロスリファレンスでは参考品名が表示されますので、製品に関する最新の情報をデータシート等でご確認の上、単独およびシステム全体で十分に評価し、お客様の責任において適用可否を判断してください。参考にしている情報は、取得した時点の各メーカーの公式情報に基づいた当社の推定によるものです。当社は、情報の正確性、完全性に関して一切の保証をいたしません。また、情報は予告なく変更されることがあります。
品番は3文字以上指定して下さい。
オンラインディストリビューターが保有する東芝製品の在庫照会および購入が行えるサービスです。
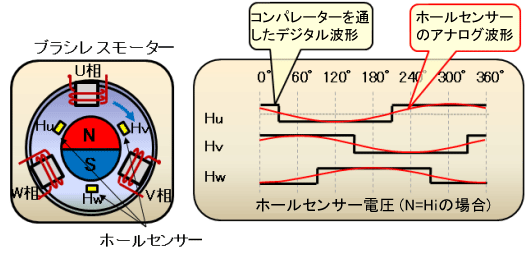
3-6. 誘起電圧による位置検出
誘起電圧による位置検出
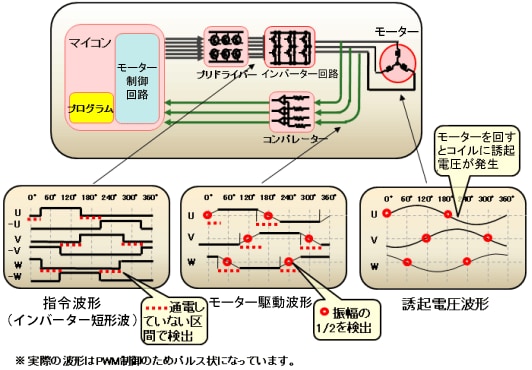
超小型モーターや、安価なモーターではセンサーを付けるスペースがないため、誘起電圧によるローター位置検出を行っています。
ローターが回転することで発生する起電力(誘起電圧)の波形により位置を特定する方法です。
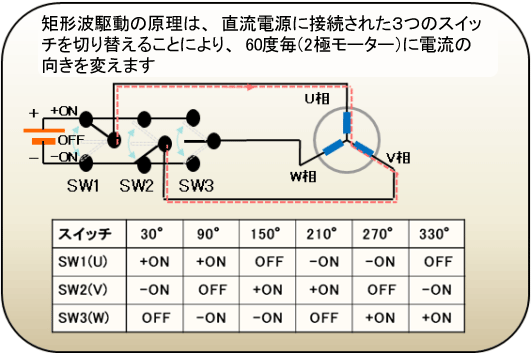
誘起電圧によるローター位置検出ができるのは矩形波駆動のみです。U相、V相、W相の3組のコイルの内オフになっている相が必ず 1組存在しており、その通電していない相でモーター駆動波形の振幅が1/2になるポイントを検出することで、ローターの位置を60度毎に特定します。
欠点としては停止状態では起電力が発生しないため位置の検出ができないことです。